#include <itkFiniteDifferenceFunction.h>
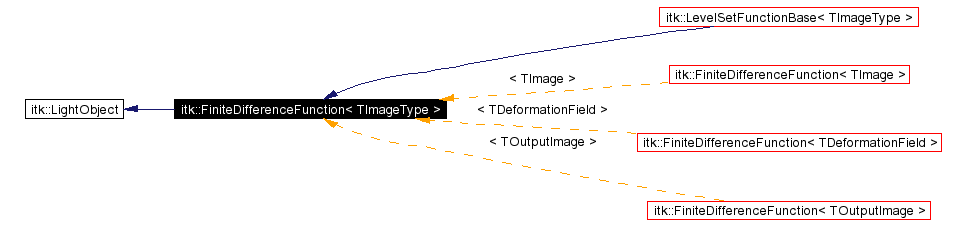
Inheritance diagram for itk::FiniteDifferenceFunction:
Public Types | |
| typedef FiniteDifferenceFunction | Self |
| typedef LightObject | Superclass |
| typedef SmartPointer< Self > | Pointer |
| typedef SmartPointer< const Self > | ConstPointer |
| typedef TImageType | ImageType |
| typedef ImageType::PixelType | PixelType |
| typedef double | TimeStepType |
| typedef ZeroFluxNeumannBoundaryCondition< ImageType > | DefaultBoundaryConditionType |
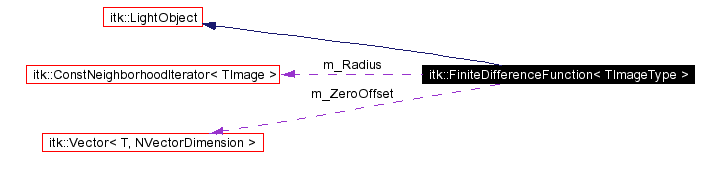
| typedef ConstNeighborhoodIterator< TImageType >::RadiusType | RadiusType |
| typedef ConstNeighborhoodIterator< TImageType > | NeighborhoodType |
| typedef ConstSmartNeighborhoodIterator< TImageType, DefaultBoundaryConditionType > | BoundaryNeighborhoodType |
| typedef Vector< float, itkGetStaticConstMacro(ImageDimension) | FloatOffsetType ) |
Public Methods | |
| virtual const char * | GetClassName () const |
| itkStaticConstMacro (ImageDimension, unsigned int, ImageType::ImageDimension) | |
| virtual void | InitializeIteration () |
| virtual PixelType | ComputeUpdate (const NeighborhoodType &neighborhood, void *globalData, const FloatOffsetType &offset=m_ZeroOffset) const=0 |
| virtual PixelType | ComputeUpdate (const BoundaryNeighborhoodType &neighborhood, void *globalData, const FloatOffsetType &offset=m_ZeroOffset) const=0 |
| void | SetRadius (const RadiusType &r) |
| const RadiusType & | GetRadius () const |
| virtual TimeStepType | ComputeGlobalTimeStep (void *GlobalData) const=0 |
| virtual void * | GetGlobalDataPointer () const=0 |
| virtual void | ReleaseGlobalDataPointer (void *GlobalData) const=0 |
Protected Methods | |
| FiniteDifferenceFunction () | |
| ~FiniteDifferenceFunction () | |
| void | PrintSelf (std::ostream &os, Indent indent) const |
Protected Attributes | |
| RadiusType | m_Radius |
Static Protected Attributes | |
| FloatOffsetType | m_ZeroOffset |
These functions calculate the incremental change at a pixel in the solution image from one iteration of the p.d.e. solver to the next.
Subclasses of FiniteDifferenceImageFilter (solvers) call the ComputeUpdate() method of this class to compute  at each
at each  . in
. in  . Because the size of the time step for each iteration of the p.d.e. solution depends on the particular calculations done, this function object is also responsible for computing that time step (see ComputeGlobalTimeStep).
. Because the size of the time step for each iteration of the p.d.e. solution depends on the particular calculations done, this function object is also responsible for computing that time step (see ComputeGlobalTimeStep).
Definition at line 63 of file itkFiniteDifferenceFunction.h.
|
|||||
|
|||||
|
|||||
|
The default boundary condition for finite difference functions that is used unless overridden in the Evaluate() method. Definition at line 90 of file itkFiniteDifferenceFunction.h. |
|
|||||
|
|||||
|
|||||
|
|||||
|
|||||
|
|||||
|
|||||
|
|||||
|
|||||
|
|||||||||
|
Definition at line 181 of file itkFiniteDifferenceFunction.h. |
|
|||||||||
|
Definition at line 182 of file itkFiniteDifferenceFunction.h. |
|
||||||||||
|
Computes the time step for an update given a global data structure. The data used in the computation may take different forms depending on the nature of the equations. This global data cannot be kept in the instance of the equation object itself since the equation object must remain stateless for thread safety. The global data is therefore managed for each thread by the finite difference solver filters. Implemented in itk::CurvatureFlowFunction< TImage >, itk::DemonsRegistrationFunction< TFixedImage, TMovingImage, TDeformationField >, itk::AnisotropicDiffusionFunction< TImage >, itk::LevelSetFunction< TImageType >, and itk::LevelSetFunction< TOutputImage >. |
|
||||||||||||||||||||
|
This method is called by a finite difference solver image filter at each pixel that lies on the data set boundary. See its overloaded counterpart for more information. Implemented in itk::BinaryMinMaxCurvatureFlowFunction< TImage >, itk::CurvatureFlowFunction< TImage >, itk::DemonsRegistrationFunction< TFixedImage, TMovingImage, TDeformationField >, itk::MinMaxCurvatureFlowFunction< TImage >, itk::CurvatureNDAnisotropicDiffusionFunction< TImage >, itk::GradientNDAnisotropicDiffusionFunction< TImage >, itk::VectorCurvatureNDAnisotropicDiffusionFunction< TImage >, itk::VectorGradientNDAnisotropicDiffusionFunction< TImage >, itk::LevelSetFunction< TImageType >, and itk::LevelSetFunction< TOutputImage >. |
|
||||||||||||||||||||
|
This method is called by a finite difference solver image filter at each pixel that does not lie on a data set boundary. The width of the data set boundary is defined by the width of the neighborhood being evaluated. The neighborhood argument is the neighborhood data. The globalData argument is a pointer to a data structure that holds values that need to be persistent across calls to this function, but cannot be stored in the function object itself for thread-safety reasons. Examples are values needed to compute the time-step for an iteration of the solver.
Implemented in itk::BinaryMinMaxCurvatureFlowFunction< TImage >, itk::CurvatureFlowFunction< TImage >, itk::DemonsRegistrationFunction< TFixedImage, TMovingImage, TDeformationField >, itk::MinMaxCurvatureFlowFunction< TImage >, itk::CurvatureNDAnisotropicDiffusionFunction< TImage >, itk::GradientNDAnisotropicDiffusionFunction< TImage >, itk::VectorCurvatureNDAnisotropicDiffusionFunction< TImage >, itk::VectorGradientNDAnisotropicDiffusionFunction< TImage >, itk::LevelSetFunction< TImageType >, and itk::LevelSetFunction< TOutputImage >. |
|
|||||||||
|
|||||||||
|
Returns a pointer to a global data structure that is passed to this object from the solver at each calculation. The idea is that the solver holds the state of any global values needed to calculate the time step, while the equation object performs the actual calculations. The global data should also be initialized in this method. Implemented in itk::CurvatureFlowFunction< TImage >, itk::DemonsRegistrationFunction< TFixedImage, TMovingImage, TDeformationField >, itk::AnisotropicDiffusionFunction< TImage >, itk::LevelSetFunction< TImageType >, and itk::LevelSetFunction< TOutputImage >. |
|
|||||||||
|
Returns the radius of the neighborhood this FiniteDifferenceFunction needs to perform its calculations. Definition at line 153 of file itkFiniteDifferenceFunction.h. |
|
|||||||||
|
This method allows the function to set its state before each iteration of the finite difference solver (image filter) that uses it. This is a thread-safe time to manipulate the object's state. An example of how this can be used: the Anisotropic diffusion class of FiniteDifferenceFunctions use this method to pre-calculate an average gradient magnitude across the entire image region. This value is set in the function object and used by the ComputeUpdate methods that are called at each pixel as a constant. Reimplemented in itk::DemonsRegistrationFunction< TFixedImage, TMovingImage, TDeformationField >, itk::CurvatureNDAnisotropicDiffusionFunction< TImage >, itk::GradientNDAnisotropicDiffusionFunction< TImage >, itk::VectorCurvatureNDAnisotropicDiffusionFunction< TImage >, and itk::VectorGradientNDAnisotropicDiffusionFunction< TImage >. Definition at line 117 of file itkFiniteDifferenceFunction.h. |
|
||||||||||||||||||||
|
Save image dimension. |
|
||||||||||||||||
|
||||||||||
|
When the finite difference solver filter has finished using a global data pointer, it passes it to this method, which frees the memory. The solver cannot free the memory because it does not know the type to which the pointer points. Implemented in itk::CurvatureFlowFunction< TImage >, itk::DemonsRegistrationFunction< TFixedImage, TMovingImage, TDeformationField >, itk::AnisotropicDiffusionFunction< TImage >, itk::LevelSetFunction< TImageType >, and itk::LevelSetFunction< TOutputImage >. |
|
||||||||||
|
Sets the radius of the neighborhood this FiniteDifferenceFunction needs to perform its calculations. Definition at line 148 of file itkFiniteDifferenceFunction.h. |
|
|||||
|
Definition at line 189 of file itkFiniteDifferenceFunction.h. Referenced by itk::FiniteDifferenceFunction< TOutputImage >::GetRadius(), itk::FiniteDifferenceFunction< TOutputImage >::PrintSelf(), and itk::FiniteDifferenceFunction< TOutputImage >::SetRadius(). |
|
|||||
|
An internal constant to represent an n-dimensional floating-point grid offset of zero. Definition at line 193 of file itkFiniteDifferenceFunction.h. |
 1.2.15 written by Dimitri van Heesch,
© 1997-2000
1.2.15 written by Dimitri van Heesch,
© 1997-2000