#include <itkMRFImageFilter.h>
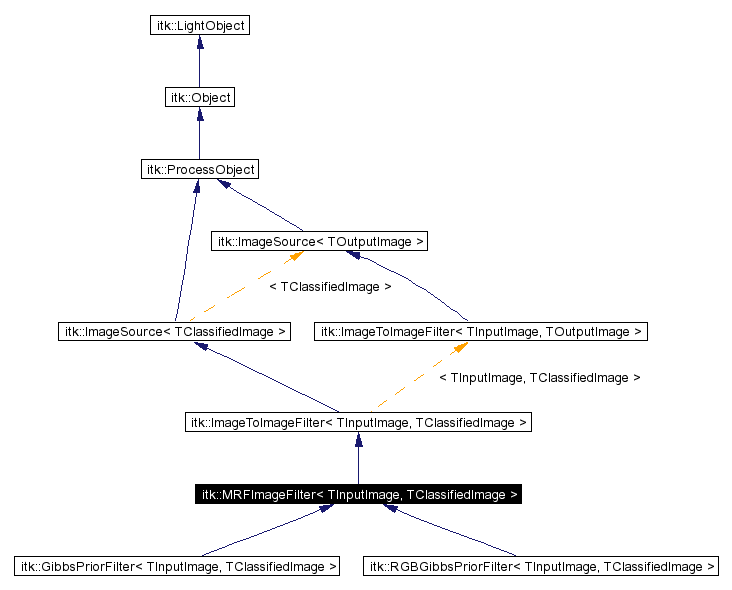
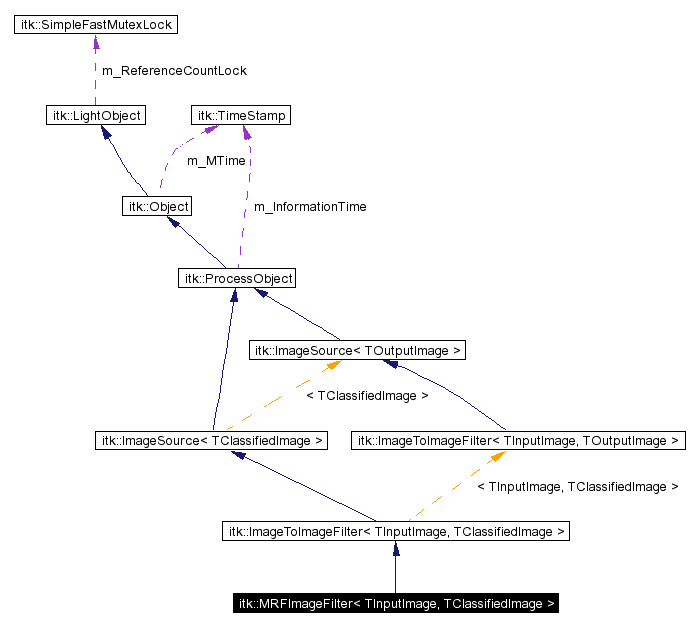
Inheritance diagram for itk::MRFImageFilter:
Public Types | |
| typedef MRFImageFilter | Self |
| typedef ImageToImageFilter< TInputImage, TClassifiedImage > | Superclass |
| typedef SmartPointer< Self > | Pointer |
| typedef SmartPointer< const Self > | ConstPointer |
| typedef Superclass::OutputImagePointer | OutputImagePointer |
| typedef TInputImage | InputImageType |
| typedef TInputImage::Pointer | InputImagePointer |
| typedef TInputImage::ConstPointer | InputImageConstPointer |
| typedef TInputImage::PixelType | InputImagePixelType |
| typedef TInputImage::RegionType | InputImageRegionType |
| typedef ImageRegionIterator< TInputImage > | InputImageRegionIterator |
| typedef ImageRegionConstIterator< TInputImage > | InputImageRegionConstIterator |
| typedef TClassifiedImage::Pointer | TrainingImagePointer |
| typedef TClassifiedImage::PixelType | TrainingImagePixelType |
| typedef TClassifiedImage::Pointer | LabelledImagePointer |
| typedef TClassifiedImage::PixelType | LabelledImagePixelType |
| typedef TClassifiedImage::RegionType | LabelledImageRegionType |
| typedef TClassifiedImage::IndexType | LabelledImageIndexType |
| typedef LabelledImageIndexType::IndexValueType | IndexValueType |
| typedef TClassifiedImage::OffsetType | LabelledImageOffsetType |
| typedef ImageRegionIterator< TClassifiedImage > | LabelledImageRegionIterator |
| typedef ImageClassifierBase< TInputImage, TClassifiedImage > | ClassifierType |
| typedef TInputImage::SizeType | SizeType |
| typedef TInputImage::SizeType | NeighborhoodRadiusType |
| typedef ConstNeighborhoodIterator< TInputImage > | InputImageNeighborhoodIterator |
| typedef InputImageNeighborhoodIterator::RadiusType | InputImageNeighborhoodRadiusType |
| typedef NeighborhoodAlgorithm::ImageBoundaryFacesCalculator< TInputImage > | InputImageFacesCalculator |
| typedef InputImageFacesCalculator::FaceListType | InputImageFaceListType |
| typedef InputImageFaceListType::iterator | InputImageFaceListIterator |
| typedef NeighborhoodIterator< TClassifiedImage > | LabelledImageNeighborhoodIterator |
| typedef LabelledImageNeighborhoodIterator::RadiusType | LabelledImageNeighborhoodRadiusType |
| typedef NeighborhoodAlgorithm::ImageBoundaryFacesCalculator< TClassifiedImage > | LabelledImageFacesCalculator |
| typedef LabelledImageFacesCalculator::FaceListType | LabelledImageFaceListType |
| typedef LabelledImageFaceListType::iterator | LabelledImageFaceListIterator |
Public Methods | |
| virtual const char * | GetClassName () const |
| itkStaticConstMacro (InputImageDimension, unsigned int, TInputImage::ImageDimension) | |
| itkStaticConstMacro (ClassifiedImageDimension, unsigned int, TClassifiedImage::ImageDimension) | |
| void | SetClassifier (typename ClassifierType::Pointer ptrToClassifier) |
| void | SetNeighborhoodRadius (const NeighborhoodRadiusType &) |
| void | SetNeighborhoodRadius (const unsigned long) |
| void | SetNeighborhoodRadius (const unsigned long *radiusArray) |
| const NeighborhoodRadiusType | GetNeighborhoodRadius () const |
| virtual void | SetNumberOfClasses (unsigned int _arg) |
| virtual unsigned int | GetNumberOfClasses () |
| virtual void | SetMaximumNumberOfIterations (unsigned int _arg) |
| virtual unsigned int | GetMaximumNumberOfIterations () |
| virtual void | SetErrorTolerance (double _arg) |
| virtual double | GetErrorTolerance () |
| virtual void | SetSmoothingFactor (double _arg) |
| virtual double | GetSmoothingFactor () |
| virtual void | SetMRFNeighborhoodWeight (std::vector< double > BetaMatrix) |
| virtual std::vector< double > | GetMRFNeighborhoodWeight () |
Static Public Methods | |
| Pointer | New () |
Protected Types | |
| typedef Image< int, itkGetStaticConstMacro(InputImageDimension) | LabelStatusImageType ) |
| typedef LabelStatusImageType::IndexType | LabelStatusIndexType |
| typedef LabelStatusImageType::RegionType | LabelStatusRegionType |
| typedef LabelStatusImageType::Pointer | LabelStatusImagePointer |
| typedef ImageRegionIterator< LabelStatusImageType > | LabelStatusImageIterator |
| typedef NeighborhoodIterator< LabelStatusImageType > | LabelStatusImageNeighborhoodIterator |
Protected Methods | |
| MRFImageFilter () | |
| ~MRFImageFilter () | |
| void | PrintSelf (std::ostream &os, Indent indent) const |
| void | Allocate () |
| virtual void | ApplyMRFImageFilter () |
| virtual void | MinimizeFunctional () |
| virtual void | DoNeighborhoodOperation (const InputImageNeighborhoodIterator &imageIter, LabelledImageNeighborhoodIterator &labelledIter, LabelStatusImageNeighborhoodIterator &labelStatusIter) |
| virtual void | GenerateData () |
| virtual void | GenerateInputRequestedRegion () |
| virtual void | EnlargeOutputRequestedRegion (DataObject *) |
| virtual void | GenerateOutputInformation () |
This object classifies pixels based on a Markov Random Field (MRF) model.This implementation uses the maximum a posteriori (MAP) estimates for modeling the MRF. The object traverses the data set and uses the model generated by the Mahalanobis distance classifier to gets the the distance between each pixel in the data set to a set of known classes, updates the distances by evaluating the influence of its neighboring pixels (based on a MRF model) and finally, classifies each pixel to the class which has the minimum distance to that pixel (taking the neighborhood influence under consideration). DoNeighborhoodOperation is the function that can be modified to achieve different falvors of MRF filters in derived classes.
The a classified initial labeled image is needed. It is important that the number of expected classes be set before calling the classifier. In our case we have used the ImageClassifer using a Gaussian model to generate the initial labels. This classifier requires the user to ensure that an appropriate membership functions be provided. See the documentation of the image classifier class for more information.
The influence of a neighborhood on a given pixel's classification (the MRF term) is computed by calculating a weighted sum of number of class labels in a three dimensional neighborhood. The basic idea of this neighborhood influence is that if a large number of neighbors of a pixel are of one class, then the current pixel is likely to be of the same class.
The dimensions of the neighborhood is same as the input image dimension and values of the weighting parameters are either specified by the user through the beta matrix parameter. The default weighting table is generated during object construction. The following table shows an example of a 3x3x3 neighborhood and the weighting values used. A 3 x 3 x 3 kernel is used where each value is a nonnegative parameter, which encourages neighbors to be of the same class. In this example, the influence of the pixels in the same slice is assigned a weight 1.7, the influence of the pixels in the same location in the previous and next slice is assigned a weight 1.5, while a weight 1.3 is assigned to the influence of the north, south, east, west and diagonal pixels in the previous and next slices.

The user needs to set the neighborhood size using the SetNeighborhoodRadius functions. The details on the semantics of a neighborhood can be found in the documentation associated with the itkNeighborhood and related objects. NOTE: The size of the neighborhood must match with the size of the neighborhood weighting parameters set by the user.
For minimization of the MRF labeling function the MinimizeFunctional virtual method is called. For our current implementation we use the the iterated conditional modes (ICM) algorithm described by Besag in the paper ``On the Statistical Analysis of Dirty Pictures'' in J. Royal Stat. Soc. B, Vol. 48, 1986.
In each iteration, the algorithm visits each pixel in turn and determines whether to update its classification by computing the influence of the classification of the pixel's neighbors and of the intensity data. On each iteration after the first, we reexamine the classification of a pixel only if the classification of some of its neighbors has changed in the previous iteration. The pixels' classification is updated using a synchronous scheme (iteration by iteration) until the error reaches less than the threshold or the number of iteration exceed the maximum set number of iterations.
Definition at line 129 of file itkMRFImageFilter.h.
|
|||||
|
Type definitions for classifier to be used for the MRF lavbelling. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >, and itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. Definition at line 199 of file itkMRFImageFilter.h. |
|
|||||
|
Reimplemented from itk::ImageToImageFilter< TInputImage, TClassifiedImage >. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >, and itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. Definition at line 137 of file itkMRFImageFilter.h. |
|
|||||
|
Reimplemented in itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. Definition at line 185 of file itkMRFImageFilter.h. |
|
|||||
|
Reimplemented from itk::ImageToImageFilter< TInputImage, TClassifiedImage >. Reimplemented in itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. Definition at line 149 of file itkMRFImageFilter.h. |
|
|||||
|
Definition at line 221 of file itkMRFImageFilter.h. |
|
|||||
|
Definition at line 218 of file itkMRFImageFilter.h. |
|
|||||
|
Definition at line 215 of file itkMRFImageFilter.h. |
|
|||||
|
Input image neighborhood iterator and kernel size typedef Definition at line 209 of file itkMRFImageFilter.h. |
|
|||||
|
Definition at line 212 of file itkMRFImageFilter.h. |
|
|||||
|
Type definition for the input image pixel type. Reimplemented from itk::ImageToImageFilter< TInputImage, TClassifiedImage >. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >, and itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. Definition at line 152 of file itkMRFImageFilter.h. |
|
|||||
|
Reimplemented from itk::ImageToImageFilter< TInputImage, TClassifiedImage >. Reimplemented in itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. Definition at line 148 of file itkMRFImageFilter.h. |
|
|||||
|
Reimplemented in itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. Definition at line 159 of file itkMRFImageFilter.h. |
|
|||||
|
Type definition for the input image region iterator Reimplemented in itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. Definition at line 158 of file itkMRFImageFilter.h. |
|
|||||
|
Type definition for the input image region type. Reimplemented from itk::ImageToImageFilter< TInputImage, TClassifiedImage >. Definition at line 155 of file itkMRFImageFilter.h. |
|
|||||
|
Type definition for the input image. Reimplemented from itk::ImageToImageFilter< TInputImage, TClassifiedImage >. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >, and itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. Definition at line 147 of file itkMRFImageFilter.h. |
|
|||||
|
Definition at line 237 of file itkMRFImageFilter.h. |
|
|||||
|
Definition at line 234 of file itkMRFImageFilter.h. |
|
|||||
|
Definition at line 231 of file itkMRFImageFilter.h. |
|
|||||
|
Type definition for the classified image index type. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >, and itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. Definition at line 184 of file itkMRFImageFilter.h. |
|
|||||
|
Labelled image neighborhood interator typedef Definition at line 225 of file itkMRFImageFilter.h. |
|
|||||
|
Definition at line 228 of file itkMRFImageFilter.h. |
|
|||||
|
Type definition for the classified image offset type. Definition at line 188 of file itkMRFImageFilter.h. |
|
|||||
|
Type definitions for the classified image pixel type. It has to be the same type as the training image. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >, and itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. Definition at line 177 of file itkMRFImageFilter.h. |
|
|||||
|
Type definitions for the labelled image. It is derived from the training image. Definition at line 173 of file itkMRFImageFilter.h. |
|
|||||
|
Type definition for the input image region iterator Reimplemented in itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. Definition at line 192 of file itkMRFImageFilter.h. |
|
|||||
|
Type definitions for the classified image pixel type. It has to be the same type as the training image. Definition at line 181 of file itkMRFImageFilter.h. |
|
|||||
|
Definition at line 319 of file itkMRFImageFilter.h. |
|
|||||
|
Labelled status image neighborhood interator typedef Definition at line 323 of file itkMRFImageFilter.h. |
|
|||||
|
Definition at line 317 of file itkMRFImageFilter.h. |
|
|||||
|
Definition at line 314 of file itkMRFImageFilter.h. |
|
|||||
|
Definition at line 315 of file itkMRFImageFilter.h. |
|
|||||
|
Definition at line 316 of file itkMRFImageFilter.h. |
|
|||||
|
Radius typedef support. Definition at line 205 of file itkMRFImageFilter.h. |
|
|||||
|
Reimplemented from itk::ImageSource< TClassifiedImage >. Definition at line 138 of file itkMRFImageFilter.h. |
|
|||||
|
Reimplemented from itk::ImageToImageFilter< TInputImage, TClassifiedImage >. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >, and itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. Definition at line 136 of file itkMRFImageFilter.h. |
|
|||||
|
Standard class typedefs. Reimplemented from itk::ImageToImageFilter< TInputImage, TClassifiedImage >. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >, and itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. Definition at line 134 of file itkMRFImageFilter.h. |
|
|||||
|
Size and value typedef support. Definition at line 202 of file itkMRFImageFilter.h. |
|
|||||
|
Reimplemented from itk::ImageToImageFilter< TInputImage, TClassifiedImage >. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >, and itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. Definition at line 135 of file itkMRFImageFilter.h. |
|
|||||
|
Type definitions for the training image pixel type. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >. Definition at line 169 of file itkMRFImageFilter.h. |
|
|||||
|
Type definitions for the training image. Definition at line 166 of file itkMRFImageFilter.h. |
|
|||||||||
|
|
|
|||||||||
|
|
|
|||||||||
|
Allocate memory for labelled images. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >. |
|
|||||||||
|
Apply MRF Classifier. In this example the images are labelled using Iterated Conditional Mode algorithm by J. Besag, "On statistical analysis of dirty pictures," J. Royal Stat. Soc. B, vol. 48, pp. 259-302, 1986. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >. |
|
||||||||||||||||||||
|
|
|
||||||||||
|
Give the process object a chance to indictate that it will produce more output than it was requested to produce. For example, many imaging filters must compute the entire output at once or can only produce output in complete slices. Such filters cannot handle smaller requested regions. These filters must provide an implementation of this method, setting the output requested region to the size they will produce. By default, a process object does not modify the size of the output requested region. Reimplemented from itk::ProcessObject. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >. |
|
||||||||||
|
This method causes the filter to generate its output. Reimplemented from itk::ImageSource< TClassifiedImage >. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >, and itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. |
|
|||||||||
|
What is the input requested region that is required to produce the output requested region? By default, the largest possible region is always required but this is overridden in many subclasses. For instance, for an image processing filter where an output pixel is a simple function of an input pixel, the input requested region will be set to the output requested region. For an image processing filter where an output pixel is a function of the pixels in a neighborhood of an input pixel, then the input requested region will need to be larger than the output requested region (to avoid introducing artificial boundary conditions). This function should never request an input region that is outside the the input largest possible region (i.e. implementations of this method should crop the input requested region at the boundaries of the input largest possible region). Reimplemented from itk::ImageToImageFilter< TInputImage, TClassifiedImage >. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >. |
|
|||||||||
|
Generate the information decribing the output data. The default implementation of this method will copy information from the input to the output. A filter may override this method if its output will have different information than its input. For instance, a filter that shrinks an image will need to provide an implementation for this method that changes the spacing of the pixels. Such filters should call their superclass' implementation of this method prior to changing the information values they need (i.e. GenerateOutputInformation() should call Superclass::GenerateOutputInformation() prior to changing the information. Reimplemented from itk::ProcessObject. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >. |
|
|||||||||
|
Run-time type information (and related methods). Reimplemented from itk::ImageToImageFilter< TInputImage, TClassifiedImage >. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >, and itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. |
|
|||||||||
|
Set/Get the error tollerance level which is used as a threshold to quit the iterations Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >. |
|
|||||||||
|
Set/Get the number of iteration of the Iterated Conditional Mode (ICM) algorithm. A default value is set at 50 iterations. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >, and itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. |
|
|||||||||
|
Set the weighting parameters (used in MRF algorithms). This is a function allowing the users to set the weight matrix by providing a a 1D array of weights. The default implementation supports a 3 x 3 x 3 kernel. The labeler needs to be extended for a different kernel size. Definition at line 291 of file itkMRFImageFilter.h. References HardConnectedComponentImageFilter::PrintSelf(). |
|
|||||||||
|
Get the neighborhood radius Definition at line 275 of file itkMRFImageFilter.h. |
|
|||||||||
|
Set/Get the number of classes. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >, and itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. |
|
|||||||||
|
Set/Get the degree of smoothing desired |
|
||||||||||||||||||||
|
Labelled Image dimension |
|
||||||||||||||||||||
|
Image dimension Reimplemented from itk::ImageToImageFilter< TInputImage, TClassifiedImage >. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >, and itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. |
|
|||||||||
|
Minimization algorithm to be used. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >, and itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. |
|
|||||||||
|
Method for creation through the object factory. Reimplemented from itk::ImageToImageFilter< TInputImage, TClassifiedImage >. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >, and itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. |
|
||||||||||||||||
|
Methods invoked by Print() to print information about the object including superclasses. Typically not called by the user (use Print() instead) but used in the hierarchical print process to combine the output of several classes. Reimplemented from itk::ImageToImageFilter< TInputImage, TClassifiedImage >. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >, and itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. |
|
||||||||||
|
Set the pointer to the classifer being used. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >, and itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. |
|
||||||||||
|
Set/Get the error tollerance level which is used as a threshold to quit the iterations Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >. |
|
||||||||||
|
Set/Get the number of iteration of the Iterated Conditional Mode (ICM) algorithm. A default value is set at 50 iterations. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >, and itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. |
|
||||||||||
|
Set the weighting parameters (used in MRF algorithms). This is a function allowing the users to set the weight matrix by providing a a 1D array of weights. The default implementation supports a 3 x 3 x 3 kernel. The labeler needs to be extended for a different kernel size. |
|
||||||||||
|
|
|
||||||||||
|
Sets the radius for the neighborhood, calculates size from the radius, and allocates storage. |
|
||||||||||
|
Set the neighborhood radius |
|
||||||||||
|
Set/Get the number of classes. Reimplemented in itk::GibbsPriorFilter< TInputImage, TClassifiedImage >, and itk::RGBGibbsPriorFilter< TInputImage, TClassifiedImage >. |
|
||||||||||
|
Set/Get the degree of smoothing desired |
 1.2.15 written by Dimitri van Heesch,
© 1997-2000
1.2.15 written by Dimitri van Heesch,
© 1997-2000