#include <itkSimilarity2DTransform.h>
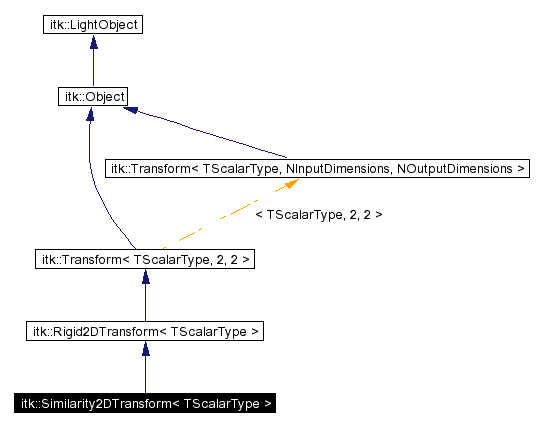
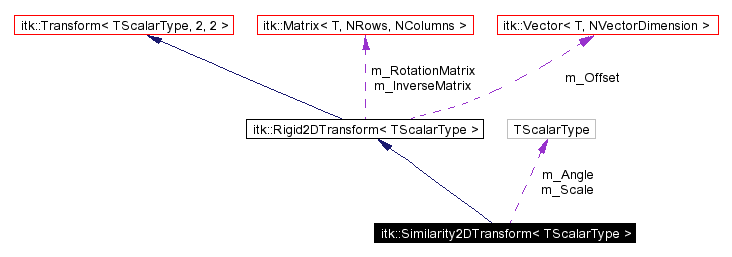
Inheritance diagram for itk::Similarity2DTransform:
Public Types | |
| typedef Similarity2DTransform | Self |
| typedef Rigid2DTransform< TScalarType > | Superclass |
| typedef SmartPointer< Self > | Pointer |
| typedef SmartPointer< const Self > | ConstPointer |
| typedef Superclass::ScalarType | ScalarType |
| typedef Superclass::ParametersType | ParametersType |
| typedef Superclass::JacobianType | JacobianType |
| typedef Superclass::OffsetType | OffsetType |
| typedef Superclass::InputPointType | InputPointType |
| typedef Superclass::OutputPointType | OutputPointType |
| typedef Superclass::InputVectorType | InputVectorType |
| typedef Superclass::OutputVectorType | OutputVectorType |
| typedef Superclass::InputCovariantVectorType | InputCovariantVectorType |
| typedef Superclass::OutputCovariantVectorType | OutputCovariantVectorType |
| typedef Superclass::InputVnlVectorType | InputVnlVectorType |
| typedef Superclass::OutputVnlVectorType | OutputVnlVectorType |
Public Methods | |
| virtual const char * | GetClassName () const |
| void | SetParameters (const ParametersType ¶meters) |
| void | SetRotation (TScalarType angle) |
| void | SetScale (TScalarType scale) |
| const ParametersType & | GetParameters (void) const |
| const JacobianType & | GetJacobian (const InputPointType &point) const |
| virtual void | SetIdentity (void) |
| itkStaticConstMacro (SpaceDimension, unsigned int, 2) | |
| itkStaticConstMacro (ParametersSpaceDimension, unsigned int, 4) | |
Static Public Methods | |
| Pointer | New () |
Protected Methods | |
| Similarity2DTransform () | |
| ~Similarity2DTransform () | |
| void | PrintSelf (std::ostream &os, Indent indent) const |
| void | ComputeMatrix (void) |
This transform applies a rotation, scale and translation to the space given one angle for rotation, a homogeneous scale and a 2D offset for translation.
Definition at line 35 of file itkSimilarity2DTransform.h.
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 43 of file itkSimilarity2DTransform.h. |
|
|||||
|
CovariantVector type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 77 of file itkSimilarity2DTransform.h. |
|
|||||
|
Point type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 69 of file itkSimilarity2DTransform.h. |
|
|||||
|
Vector type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 73 of file itkSimilarity2DTransform.h. |
|
|||||
|
VnlVector type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 81 of file itkSimilarity2DTransform.h. |
|
|||||
|
Jacobian type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 63 of file itkSimilarity2DTransform.h. |
|
|||||
|
Offset type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 66 of file itkSimilarity2DTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 78 of file itkSimilarity2DTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 70 of file itkSimilarity2DTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 74 of file itkSimilarity2DTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 82 of file itkSimilarity2DTransform.h. |
|
|||||
|
Parameters type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 60 of file itkSimilarity2DTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 42 of file itkSimilarity2DTransform.h. |
|
|||||
|
Scalar type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 57 of file itkSimilarity2DTransform.h. |
|
|||||
|
Standard class typedefs. Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 40 of file itkSimilarity2DTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 41 of file itkSimilarity2DTransform.h. |
|
|||||||||
|
|
|
|||||||||
|
Definition at line 117 of file itkSimilarity2DTransform.h. References HardConnectedComponentImageFilter::PrintSelf(). |
|
||||||||||
|
Compute the components of the rotation matrix in the superclass. |
|
|||||||||
|
Run-time type information (and related methods). Reimplemented from itk::Rigid2DTransform< TScalarType >. |
|
||||||||||
|
This method computes the Jacobian matrix of the transformation. given point or vector, returning the transformed point or vector. The rank of the Jacobian will also indicate if the transform is invertible at this point. Reimplemented from itk::Rigid2DTransform< TScalarType >. |
|
||||||||||
|
Get the parameters that uniquely define the transform This is typically used by optimizers. There are 4 parameters. The first one represents the rotation, the second one the scale and the last two represent the offset. Reimplemented from itk::Transform< TScalarType, 2, 2 >. |
|
||||||||||||||||||||
|
Dimension of parameters. Reimplemented from itk::Rigid2DTransform< TScalarType >. |
|
||||||||||||||||||||
|
Dimension of parameters. |
|
|||||||||
|
New macro for creation of through a Smart Pointer. Reimplemented from itk::Rigid2DTransform< TScalarType >. |
|
||||||||||||||||
|
Print contents of an Rigid2DTransform Reimplemented from itk::Rigid2DTransform< TScalarType >. |
|
||||||||||
|
Set the transformation to an Identity This sets the matrix to identity and the Offset to null. Reimplemented from itk::Rigid2DTransform< TScalarType >. |
|
||||||||||
|
Set the transformation from a container of parameters This is typically used by optimizers. There are 3 parameters. The first one represents the rotation and the last two represents the offset. Reimplemented from itk::Transform< TScalarType, 2, 2 >. |
|
||||||||||
|
Set the rotational part of the transform. |
|
||||||||||
|
Set the Scale part of the transform. |
 1.2.15 written by Dimitri van Heesch,
© 1997-2000
1.2.15 written by Dimitri van Heesch,
© 1997-2000