#include <itkCenteredRigid2DTransform.h>
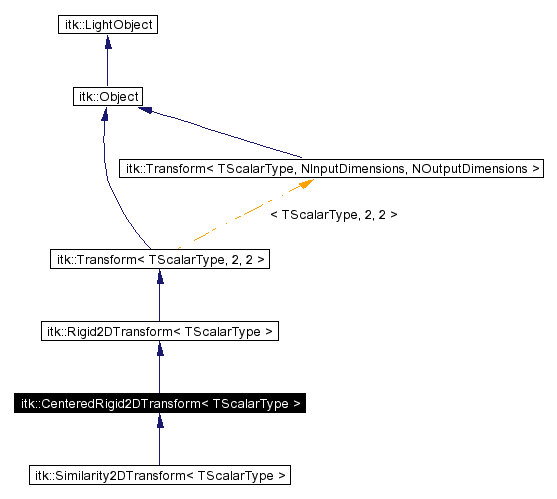
Inheritance diagram for itk::CenteredRigid2DTransform:
Public Types | |
| typedef CenteredRigid2DTransform | Self |
| typedef Rigid2DTransform< TScalarType > | Superclass |
| typedef SmartPointer< Self > | Pointer |
| typedef SmartPointer< const Self > | ConstPointer |
| typedef Superclass::ScalarType | ScalarType |
| typedef Superclass::ParametersType | ParametersType |
| typedef Superclass::JacobianType | JacobianType |
| typedef Superclass::OffsetType | OffsetType |
| typedef Superclass::InputPointType | InputPointType |
| typedef Superclass::OutputPointType | OutputPointType |
| typedef Superclass::InputVectorType | InputVectorType |
| typedef Superclass::OutputVectorType | OutputVectorType |
| typedef Superclass::InputCovariantVectorType | InputCovariantVectorType |
| typedef Superclass::OutputCovariantVectorType | OutputCovariantVectorType |
| typedef Superclass::InputVnlVectorType | InputVnlVectorType |
| typedef Superclass::OutputVnlVectorType | OutputVnlVectorType |
Public Methods | |
| virtual const char * | GetClassName () const |
| void | SetParameters (const ParametersType ¶meters) |
| const ParametersType & | GetParameters (void) const |
| const JacobianType & | GetJacobian (const InputPointType &point) const |
| virtual void | SetIdentity (void) |
| itkStaticConstMacro (SpaceDimension, unsigned int, 2) | |
| itkStaticConstMacro (OutputSpaceDimension, unsigned int, 2) | |
| itkStaticConstMacro (ParametersDimension, unsigned int, 5) | |
| void | SetAngle (TScalarType angle) |
| void | SetAngleInDegrees (TScalarType angle) |
| virtual const TScalarType & | GetAngle () |
| void | SetCenter (const InputPointType ¢er) |
| virtual const InputPointType & | GetCenter () |
| void | SetTranslation (const OutputVectorType &translation) |
| virtual const OutputVectorType & | GetTranslation () |
Static Public Methods | |
| Pointer | New () |
Protected Methods | |
| CenteredRigid2DTransform () | |
| ~CenteredRigid2DTransform () | |
| CenteredRigid2DTransform (unsigned int outputSpaceDimension, unsigned int parametersDimension) | |
| void | PrintSelf (std::ostream &os, Indent indent) const |
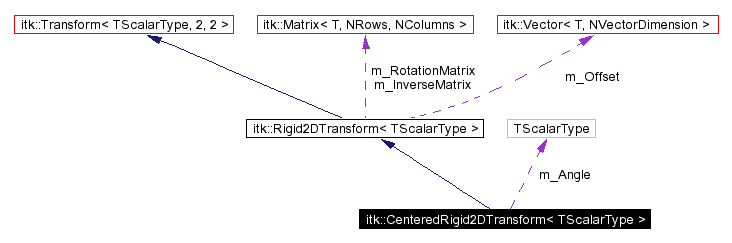
| virtual void | ComputeMatrixAndOffset (void) |
This transform applies a rigid transformation in 2D space The transformation is specified as a rotation around an arbitrary center and is followed by a translation.
The need for introducing this transform is that a rotation is not specified simply by an angle, as we use to think, but also by a center of rotation. We use to assume that the center of rotation is the origin of the coordinate system. This assumption, however does not usually hold in applications such as image registration.
In order to initialize this transform a user should provide the following
The serialization of parameters in this transform results in an array of five element ordered as follows
p[0] = angle p[1] = x coordinate of the centre p[2] = y coordinate of the centre p[3] = x component of the translation p[4] = y component of the translation
For convenience, an additional method is available for specifying the rotation in degrees instead of radians.
Definition at line 71 of file itkCenteredRigid2DTransform.h.
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. Definition at line 79 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
CovariantVector type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. Definition at line 115 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Point type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. Definition at line 107 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Vector type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. Definition at line 111 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
VnlVector type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. Definition at line 119 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Jacobian type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. Definition at line 101 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Offset type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. Definition at line 104 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. Definition at line 116 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. Definition at line 108 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. Definition at line 112 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. Definition at line 120 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Parameters type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. Definition at line 98 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. Definition at line 78 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Scalar type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. Definition at line 95 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Standard class typedefs. Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. Definition at line 76 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. Definition at line 77 of file itkCenteredRigid2DTransform.h. |
|
|||||||||
|
|
|
|||||||||
|
Definition at line 163 of file itkCenteredRigid2DTransform.h. References HardConnectedComponentImageFilter::PrintSelf(). |
|
||||||||||||||||
|
|
|
||||||||||
|
Compute the components of the rotation matrix and offset in the superclass. Reimplemented in itk::Similarity2DTransform< TScalarType >. |
|
|||||||||
|
Set the rotational part of the transform. |
|
|||||||||
|
Set and Get the center of rotation |
|
|||||||||
|
Run-time type information (and related methods). Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. |
|
||||||||||
|
This method computes the Jacobian matrix of the transformation. given point or vector, returning the transformed point or vector. The rank of the Jacobian will also indicate if the transform is invertible at this point. Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. |
|
||||||||||
|
Get the parameters that uniquely define the transform This is typically used by optimizers. There are 3 parameters. The first one represents the rotation and the last two represents the offset. Reimplemented from itk::Transform< TScalarType, 2, 2 >. Reimplemented in itk::Similarity2DTransform< TScalarType >. |
|
|||||||||
|
Set and Get the Translation to be applied after rotation |
|
||||||||||||||||||||
|
Dimension of parameters. |
|
||||||||||||||||||||
|
Dimension of parameters. Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. |
|
||||||||||||||||||||
|
Dimension of parameters. Reimplemented in itk::Similarity2DTransform< TScalarType >. |
|
|||||||||
|
New macro for creation of through a Smart Pointer. Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. |
|
||||||||||||||||
|
Print contents of an Rigid2DTransform Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. |
|
||||||||||
|
Set the rotational part of the transform. |
|
||||||||||
|
Set the rotational part of the transform. |
|
||||||||||
|
Set and Get the center of rotation |
|
||||||||||
|
Set the transformation to an Identity This sets the matrix to identity and the Offset to null. Reimplemented from itk::Rigid2DTransform< TScalarType >. Reimplemented in itk::Similarity2DTransform< TScalarType >. |
|
||||||||||
|
Set the transformation from a container of parameters This is typically used by optimizers. There are 3 parameters. The first one represents the rotation and the last two represents the offset. Reimplemented from itk::Transform< TScalarType, 2, 2 >. Reimplemented in itk::Similarity2DTransform< TScalarType >. |
|
||||||||||
|
Set and Get the Translation to be applied after rotation |
 1.2.15 written by Dimitri van Heesch,
© 1997-2000
1.2.15 written by Dimitri van Heesch,
© 1997-2000