
#include <itkWatershedSegmenter.h>
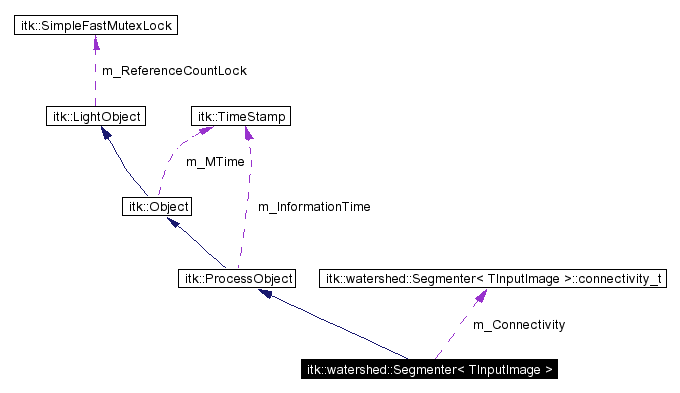
Inheritance diagram for itk::watershed::Segmenter:
|
|||||
|
Define image types and dimensionality Definition at line 106 of file itkWatershedSegmenter.h. |
|
|||||
|
Define image types and dimensionality Definition at line 105 of file itkWatershedSegmenter.h. |
|
|||||
|
Define image types and dimensionality Definition at line 104 of file itkWatershedSegmenter.h. |
|
|||||
|
Definition at line 124 of file itkWatershedSegmenter.h. |
|
|||||
|
Methods to implement smart pointers and work with the itk object factory Reimplemented from itk::ProcessObject. Definition at line 115 of file itkWatershedSegmenter.h. |
|
|||||
|
Define image types and dimensionality Reimplemented from itk::ProcessObject. Definition at line 108 of file itkWatershedSegmenter.h. Referenced by itk::watershed::Segmenter< InputImageType >::GetLargestPossibleRegion(). |
|
|||||
|
Definition at line 270 of file itkWatershedSegmenter.h. |
|
|||||
|
Table for storing tables of edges. This is convenient in generating the segment table, even though the edge tables are stored as ordered lists. An ``edge'' in this context is synonymous with a segment ``adjacency''. Definition at line 267 of file itkWatershedSegmenter.h. |
|
|||||
|
Table for storing flat region information. Definition at line 253 of file itkWatershedSegmenter.h. |
|
|||||
|
Define image types and dimensionality Definition at line 102 of file itkWatershedSegmenter.h. Referenced by itk::watershed::Segmenter< InputImageType >::GetLargestPossibleRegion(), itk::watershed::Segmenter< InputImageType >::operator=(), itk::watershed::Segmenter< InputImageType >::SetBoundary(), and itk::watershed::Segmenter< InputImageType >::SetLargestPossibleRegion(). |
|
|||||
|
Define image types and dimensionality Definition at line 98 of file itkWatershedSegmenter.h. |
|
|||||
|
Typedefs necessary on microsoft VC++ to avoid internal compiler errors Definition at line 121 of file itkWatershedSegmenter.h. Referenced by itk::watershed::Segmenter< InputImageType >::operator=(). |
|
|||||
|
Define image types and dimensionality Definition at line 103 of file itkWatershedSegmenter.h. Referenced by itk::watershed::Segmenter< InputImageType >::GetLargestPossibleRegion(), and itk::watershed::Segmenter< InputImageType >::operator=(). |
|
|||||
|
Define image types and dimensionality Definition at line 101 of file itkWatershedSegmenter.h. |
|
|||||
|
Definition at line 122 of file itkWatershedSegmenter.h. Referenced by itk::watershed::Segmenter< InputImageType >::operator=(). |
|
|||||
|
Methods to implement smart pointers and work with the itk object factory Reimplemented from itk::ProcessObject. Definition at line 114 of file itkWatershedSegmenter.h. |
|
|||||
|
Define image types and dimensionality Definition at line 107 of file itkWatershedSegmenter.h. |
|
|||||
|
Definition at line 123 of file itkWatershedSegmenter.h. |
|
|||||
|
Standard self typedefs Reimplemented from itk::ProcessObject. Definition at line 95 of file itkWatershedSegmenter.h. |
|
|||||
|
Methods to implement smart pointers and work with the itk object factory Reimplemented from itk::ProcessObject. Definition at line 113 of file itkWatershedSegmenter.h. |
|
|||||||||
|
|
|
||||||||||
|
Definition at line 273 of file itkWatershedSegmenter.h. |
|
|||||||||
|
Definition at line 274 of file itkWatershedSegmenter.h. |
|
||||||||||||||||||||
|
Performs a gradient descent connected component analysis at the boundaries of the images that border other image chunks. Useful only in data streaming applications. |
|
||||||||||||||||||||
|
Fills boundary pixels with a specified value. Used by labeling methods to build a very high ``wall'' around the image so that gradient descent does not need to watch boundaries. |
|
||||||||||
|
Traverses each boundary and fills in the data needed for joining streamed chunks of an image volume. Only necessary for streaming applications. |
|
||||||||||||||||
|
Associates each flat region with a local minimum and relabels accordingly. |
|
|||||||||
|
Constructs the connectivity list and the corresponding set of directional Offset indicies. |
|
|||||||||
|
Standard non-threaded pipeline execution method. Reimplemented from itk::ProcessObject. |
|
|||||||||
|
This method asks for an image region that is one pixel larger at each boundary than the region being processed. This single pixel expansion represents an overlap with adjacent image chunks Reimplemented from itk::ProcessObject. |
|
||||||||||
|
This method asks for an image region that is one pixel larger at each boundary than the region being processed. This single pixel expansion represents an overlap with adjacent image chunks Reimplemented from itk::ProcessObject. |
|
||||||||||
|
Returns the boundary information data necessary only for data streaming applications. Definition at line 160 of file itkWatershedSegmenter.h. |
|
|||||||||
|
Methods to implement smart pointers and work with the itk object factory Reimplemented from itk::ProcessObject. |
|
|||||||||
|
Gets/Sets the initial label (unsigned long integer value) used by the labeling algorithm. Only necessary for streaming applications. |
|
|||||||||
|
Turns on special labeling of the boundaries for streaming applications. The default value is FALSE, meaning that boundary analysis is turned off. |
|
||||||||||
|
Get/Set the input image. Definition at line 133 of file itkWatershedSegmenter.h. |
|
|||||||||
|
This method is necessary until the streaming mechanisms of the Itk pipeline are full fleshed out. It is only used for streaming applications. Calling this method gets/sets the image size of the complete volume being streamed. The member variables controlled by this method will not be modified by the Itk pipeline and are necessary for analysis of boundaries. Definition at line 182 of file itkWatershedSegmenter.h. |
|
|||||||||
|
Prior to thresholding the input image, the filter calculates minimum and maximum values for the image. These values are stored as member variables. |
|
|||||||||
|
Prior to thresholding the input image, the filter calculates minimum and maximum values for the image. These values are stored as member variables. |
|
||||||||||
|
Get/Set the labeled output image. The output image is always of unsigned long integers. Definition at line 142 of file itkWatershedSegmenter.h. |
|
||||||||||
|
Get/Set the segment table. The segment table is a table of segmentation information identifying each region produced by the labeling algorithm. Definition at line 151 of file itkWatershedSegmenter.h. |
|
|||||||||
|
Determines whether the algorithm will sort the adjacencies in its SegmentTable before returning. Default is true. This is an option only useful for streaming applications where the sorting only needs to be done after all iterations have taken place. |
|
|||||||||
|
Gets/Sets the input threshold. Threshold is specified as a percentage (0.0 - 1.0) of the maximum height of the image. This filter thresholds the input image to remove all values below /f$ L = min + T * (max - min) /f$, where /f$ max, min /f$ are the maximum, minimum values in the image and /f$ T /f$ is the threshold parameter value. Values in the image less than /f$ L /f$ are raised to /f$ L /f$. Thresholding minimum values in the image decreases the number of local minima in the image and produces an initial segmentation with fewer segments. The assumption is that the ``shallow'' regions that this thresholding eliminates are generally not of interest. |
|
||||||||||||||||
|
Follows each unlabeled pixel in the image down its path of steepest descent. Each pixel along that path is identified with the local minima already labeled at the end of the path. |
|
|||||||||
|
Allocates boundary structure information and sets the boundary data to null values. |
|
||||||||||||||||||||
|
Define image types and dimensionality |
|
||||||||||||||||||||||||
|
Labels all the local minima in the image. Also identifies and labels connected ``flat'' regions. |
|
||||||||||
|
Standard itk::ProcessObject subclass method. Reimplemented from itk::ProcessObject. |
|
||||||||||||||||
|
Helper function. Finds the minimum and maximum values in an image. |
|
||||||||||||||||||||||||
|
Helper function. Finds the minimum and maximum values in an image. |
|
|||||||||
|
Methods to implement smart pointers and work with the itk object factory Reimplemented from itk::Object. |
|
||||||||||
|
Reimplemented from itk::ProcessObject. Definition at line 280 of file itkWatershedSegmenter.h. |
|
||||||||||||||||
|
Methods invoked by Print() to print information about the object including superclasses. Typically not called by the user (use Print() instead) but used in the hierarchical print process to combine the output of several classes. Reimplemented from itk::ProcessObject. |
|
||||||||||||||||||||
|
Helper function. Other classes may have occasion to use this. Relabels an image according to a table of equivalencies. |
|
||||||||||
|
Returns the boundary information data necessary only for data streaming applications. Definition at line 163 of file itkWatershedSegmenter.h. |
|
||||||||||
|
Gets/Sets the initial label (unsigned long integer value) used by the labeling algorithm. Only necessary for streaming applications. |
|
||||||||||
|
Turns on special labeling of the boundaries for streaming applications. The default value is FALSE, meaning that boundary analysis is turned off. |
|
||||||||||||||||||||
|
|
|
||||||||||||||||||||
|
Helper functions for filling in regions with values |
|
||||||||||
|
Get/Set the input image. Definition at line 136 of file itkWatershedSegmenter.h. |
|
||||||||||
|
This method is necessary until the streaming mechanisms of the Itk pipeline are full fleshed out. It is only used for streaming applications. Calling this method gets/sets the image size of the complete volume being streamed. The member variables controlled by this method will not be modified by the Itk pipeline and are necessary for analysis of boundaries. Definition at line 176 of file itkWatershedSegmenter.h. |
|
||||||||||
|
Prior to thresholding the input image, the filter calculates minimum and maximum values for the image. These values are stored as member variables. |
|
||||||||||
|
Prior to thresholding the input image, the filter calculates minimum and maximum values for the image. These values are stored as member variables. |
|
||||||||||
|
Get/Set the labeled output image. The output image is always of unsigned long integers. Definition at line 145 of file itkWatershedSegmenter.h. |
|
||||||||||
|
Get/Set the segment table. The segment table is a table of segmentation information identifying each region produced by the labeling algorithm. Definition at line 154 of file itkWatershedSegmenter.h. |
|
||||||||||
|
Determines whether the algorithm will sort the adjacencies in its SegmentTable before returning. Default is true. This is an option only useful for streaming applications where the sorting only needs to be done after all iterations have taken place. |
|
||||||||||
|
Gets/Sets the input threshold. Threshold is specified as a percentage (0.0 - 1.0) of the maximum height of the image. This filter thresholds the input image to remove all values below /f$ L = min + T * (max - min) /f$, where /f$ max, min /f$ are the maximum, minimum values in the image and /f$ T /f$ is the threshold parameter value. Values in the image less than /f$ L /f$ are raised to /f$ L /f$. Thresholding minimum values in the image decreases the number of local minima in the image and produces an initial segmentation with fewer segments. The assumption is that the ``shallow'' regions that this thresholding eliminates are generally not of interest. |
|
||||||||||||||||||||||||||||
|
Helper function. Thresholds low values and copies values from one image into another. The source and destination regions must match in size (not enforced). Referenced by itk::watershed::Segmenter< InputImageType >::GetLargestPossibleRegion(). |
|
|||||||||
|
This method asks for an image region that is one pixel larger at each boundary than the region being processed. This single pixel expansion represents an overlap with adjacent image chunks Reimplemented from itk::ProcessObject. |
|
||||||||||||||||
|
Adds entries to the output segment table for all labeled segments in the image. |
|
|||||
|
Holds generalized connectivity information for connected component labeling and gradient descent analysis in pixel neighborhoods. Definition at line 367 of file itkWatershedSegmenter.h. Referenced by itk::watershed::Segmenter< InputImageType >::operator=(). |
|
|||||
|
A constant used in the labeling algorithm. Definition at line 130 of file itkWatershedSegmenter.h. |
|
|||||
|
A constant used in the labeling algorithm. Definition at line 127 of file itkWatershedSegmenter.h. |
 1.2.15 written by Dimitri van Heesch,
© 1997-2000
1.2.15 written by Dimitri van Heesch,
© 1997-2000