#include <itkConfidenceConnectedImageFilter.h>
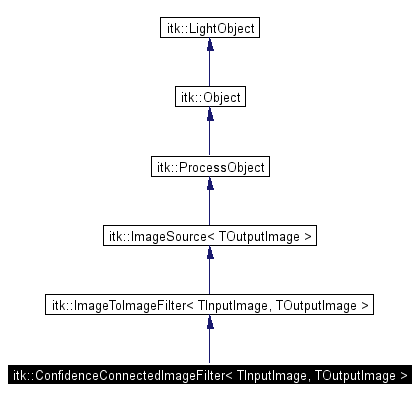
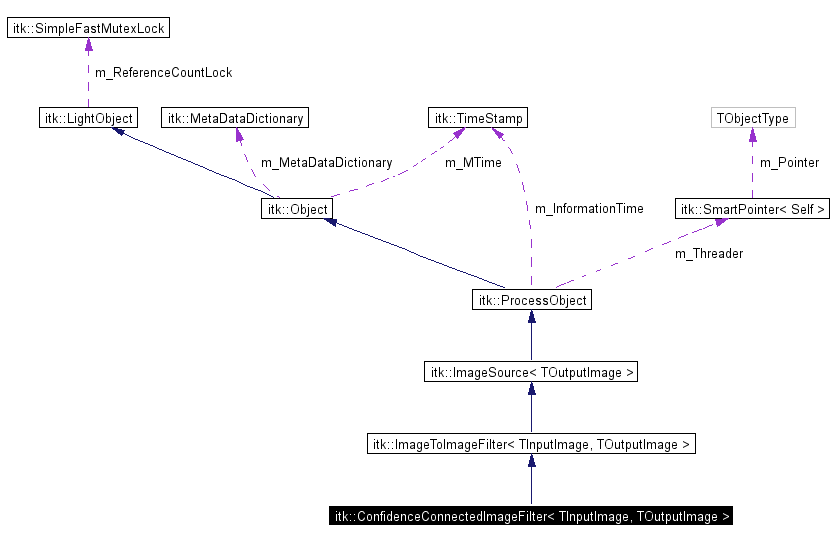
Inheritance diagram for itk::ConfidenceConnectedImageFilter< TInputImage, TOutputImage >:
This filter extracts a connected set of pixels whose pixel intensities are consistent with the pixel statistics of a seed point. The mean and variance across a neighborhood (8-connected, 26-connected, etc.) are calculated for a seed point. Then pixels connected to this seed point whose values are within the confidence interval for the seed point are grouped. The width of the confidence interval is controlled by the "Multiplier" variable (the confidence interval is the mean plus or minus the "Multiplier" times the standard deviation). If the intensity variations across a segment were gaussian, a "Multiplier" setting of 2.5 would define a confidence interval wide enough to capture 99% of samples in the segment.
After this initial segmentation is calculated, the mean and variance are re-calculated. All the pixels in the previous segmentation are used to calculate the mean the standard deviation (as opposed to using the pixels in the neighborhood of the seed point). The segmentation is then recalculted using these refined estimates for the mean and variance of the pixel values. This process is repeated for the specified number of iterations. Setting the "NumberOfIterations" to zero stops the algorithm after the initial segmentation from the seed point.
NOTE: the lower and upper threshold are restricted to lie within the valid numeric limits of the input data pixel type. Also, the limits may be adjusted to contain the seed point's intensity.
Definition at line 57 of file itkConfidenceConnectedImageFilter.h.
|
|||||
|
Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. Definition at line 66 of file itkConfidenceConnectedImageFilter.h. |
|
|||||
|
Definition at line 79 of file itkConfidenceConnectedImageFilter.h. |
|
|||||
|
Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. Definition at line 78 of file itkConfidenceConnectedImageFilter.h. |
|
|||||
|
Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. Definition at line 76 of file itkConfidenceConnectedImageFilter.h. |
|
|||||
|
Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. Definition at line 77 of file itkConfidenceConnectedImageFilter.h. |
|
|||||
|
Some convenient typedefs. Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. Definition at line 75 of file itkConfidenceConnectedImageFilter.h. |
|
|||||
|
Reimplemented from itk::ImageSource< TOutputImage >. Definition at line 85 of file itkConfidenceConnectedImageFilter.h. Referenced by itk::ConfidenceConnectedImageFilter< TInputImage, TOutputImage >::~ConfidenceConnectedImageFilter(). |
|
|||||
|
Reimplemented from itk::ImageSource< TOutputImage >. Definition at line 83 of file itkConfidenceConnectedImageFilter.h. |
|
|||||
|
Superclass typedefs. Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. Definition at line 84 of file itkConfidenceConnectedImageFilter.h. |
|
|||||
|
Some convenient typedefs. Reimplemented from itk::ImageSource< TOutputImage >. Definition at line 82 of file itkConfidenceConnectedImageFilter.h. |
|
|||||
|
Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. Definition at line 65 of file itkConfidenceConnectedImageFilter.h. |
|
|||||
|
Definition at line 87 of file itkConfidenceConnectedImageFilter.h. Referenced by itk::ConfidenceConnectedImageFilter< TInputImage, TOutputImage >::~ConfidenceConnectedImageFilter(). |
|
|||||
|
Standard class typedefs. Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. Definition at line 63 of file itkConfidenceConnectedImageFilter.h. Referenced by itk::ConfidenceConnectedImageFilter< TInputImage, TOutputImage >::~ConfidenceConnectedImageFilter(). |
|
|||||
|
Definition at line 80 of file itkConfidenceConnectedImageFilter.h. |
|
|||||
|
Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. Definition at line 64 of file itkConfidenceConnectedImageFilter.h. |
|
|||||||||
|
|
|
|||||||||
|
||||||||||
|
Add seed point. Definition at line 101 of file itkConfidenceConnectedImageFilter.h. |
|
||||||||||
|
Give the process object a chance to indictate that it will produce more output than it was requested to produce. For example, many imaging filters must compute the entire output at once or can only produce output in complete slices. Such filters cannot handle smaller requested regions. These filters must provide an implementation of this method, setting the output requested region to the size they will produce. By default, a process object does not modify the size of the output requested region. Reimplemented from itk::ProcessObject.
|
|
|||||||||
|
A version of GenerateData() specific for image processing filters. This implementation will split the processing across multiple threads. The buffer is allocated by this method. Then the BeforeThreadedGenerateData() method is called (if provided). Then, a series of threads are spawned each calling ThreadedGenerateData(). After all the threads have completed processing, the AfterThreadedGenerateData() method is called (if provided). If an image processing filter cannot be threaded, the filter should provide an implementation of GenerateData(). That implementation is responsible for allocating the output buffer. If a filter an be threaded, it should NOT provide a GenerateData() method but should provide a ThreadedGenerateData() instead.
Reimplemented from itk::ImageSource< TOutputImage >.
|
|
|||||||||
|
What is the input requested region that is required to produce the output requested region? The base assumption for image processing filters is that the input requested region can be set to match the output requested region. If a filter requires more input (for instance a filter that uses neighborhoods needs more input than output to avoid introducing artificial boundary conditions) or less input (for instance a magnify filter) will have to override this method. In doing so, it should call its superclass' implementation as its first step. Note that imaging filters operate differently than the classes to this point in the class hierachy. Up till now, the base assumption has been that the largest possible region will be requested of the input. This implementation of GenerateInputRequestedRegion() only processes the inputs that are a subclass of the ImageBase<InputImageDimension>. If an input is another type of DataObject (including an Image of a different dimension), they are skipped by this method. The subclasses of ImageToImageFilter are responsible for providing an implementation of GenerateInputRequestedRegion() when there are multiple inputs of different types.
Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >.
|
|
|||||||||
|
Run-time type information (and related methods). Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >.
|
|
|||||||||
|
Get/Set the radius of the neighborhood over which the statistics are evaluated |
|
|||||||||
|
Set/Get the multiplier to define the confidence interval. Multiplier can be anything greater than zero. A typical value is 2.5 |
|
|||||||||
|
Set/Get the number of iterations |
|
|||||||||
|
Set/Get value to replace thresholded pixels |
|
|||||||||
|
Method for creation through the object factory. Reimplemented from itk::Object.
|
|
||||||||||||||||
|
Methods invoked by Print() to print information about the object including superclasses. Typically not called by the user (use Print() instead) but used in the hierarchical print process to combine the output of several classes. Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >.
|
|
||||||||||
|
Get/Set the radius of the neighborhood over which the statistics are evaluated |
|
||||||||||
|
Set/Get the multiplier to define the confidence interval. Multiplier can be anything greater than zero. A typical value is 2.5 |
|
||||||||||
|
Set/Get the number of iterations |
|
||||||||||
|
Set/Get value to replace thresholded pixels |
|
||||||||||
|
Set seed point. This method is deprecated, please use AddSeed() Definition at line 92 of file itkConfidenceConnectedImageFilter.h. |
 1.3.8 written by Dimitri van Heesch,
© 1997-2000
1.3.8 written by Dimitri van Heesch,
© 1997-2000