Main Page
Groups
Namespace List
Class Hierarchy
Alphabetical List
Compound List
File
List
Namespace Members
Compound Members
File Members
Concepts
itk::DanielssonDistanceMapImageFilter< TInputImage, TOutputImage > Class Template Reference
[Image Feature Extraction Filters]
#include <itkDanielssonDistanceMapImageFilter.h>
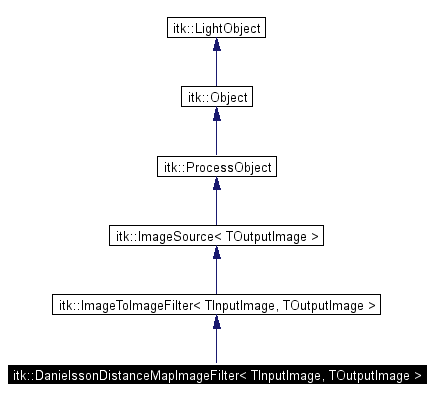
Inheritance diagram for itk::DanielssonDistanceMapImageFilter< TInputImage, TOutputImage >:
 [legend]Collaboration diagram for itk::DanielssonDistanceMapImageFilter< TInputImage, TOutputImage >:
[legend]Collaboration diagram for itk::DanielssonDistanceMapImageFilter< TInputImage, TOutputImage >: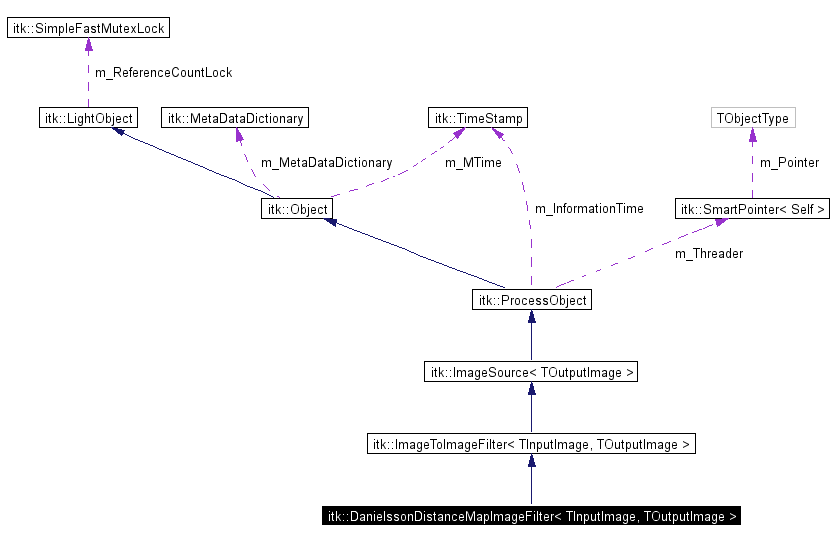 [legend]List of all members.
[legend]List of all members.
Detailed Description
template<class TInputImage, class TOutputImage>
class itk::DanielssonDistanceMapImageFilter< TInputImage, TOutputImage >
This class is parametrized over the type of the input image and the type of the output image.
This filter computes the distance map of the input image as an approximation with pixel accuracy to the Euclidean distance.
The input is assumed to contain numeric codes defining objects. The filter will produce as output the following images:
- A voronoi partition using the same numeric codes as the input.
- A distance map with the approximation to the euclidean distance. from a particular pixel to the nearest object to this pixel in the input image.
- A vector map containing the component of the vector relating the current pixel with the closest point of the closest object to this pixel. Given that the components of the distance are computed in "pixels", the vector is represented by an itk::Offset. That is, physical coordinates are not used.
This filter is N-dimensional and known to be efficient in computational time. The algorithm is the N-dimensional version of the 4SED algorithm given for two dimensions in:
Danielsson, Per-Erik. Euclidean Distance Mapping. Computer Graphics and Image Processing 14, 227-248 (1980).
Definition at line 59 of file itkDanielssonDistanceMapImageFilter.h.
Member Typedef Documentation
Constructor & Destructor Documentation
Member Function Documentation
|
|
Get Distance map image. The distance map is shown as a gray value image depending on the pixel type of the output image. Regarding the source image, background should be dark (gray value = 0) and object should have a gray value larger than 0. The minimal distance is calculated on the object frontier, and the output image gives for each pixel its minimal distance from the object (if there is more than one object the closest object is considered). |
|
|
Get the distance squared. |
|
|
Get vector field of distances. |
|
|
Get Voronoi Map This map shows for each pixel what object is closest to it. Each object should be labeled by a number (larger than 0), so the map has a value for each pixel corresponding to the label of the closest object. |
|
template<class TInputImage, class TOutputImage> |
| itk::DanielssonDistanceMapImageFilter< TInputImage, TOutputImage >::itkStaticConstMacro |
( |
InputImageDimension |
, |
|
|
unsigned |
int, |
|
|
InputImageType::ImageDimension |
|
|
) |
|
|
|
|
The dimension of the input image. |
|
|
Method for creation through the object factory
Reimplemented from itk::Object.
|
|
|
Set if the input is binary. If this variable is set, each nonzero pixel in the input image will be given a unique numeric code to be used by the Voronoi partition. If the image is binary but you are not interested in the Voronoi regions of the different nonzero pixels, then you need not set this. |
|
|
Set if the distance should be squared. |
|
|
Set On/Off if the distance is squared. |
The documentation for this class was generated from the following file:
Generated at Sat Mar 31 02:43:14 2007 for ITK by  1.3.8 written by Dimitri van Heesch,
© 1997-2000
1.3.8 written by Dimitri van Heesch,
© 1997-2000