#include <itkVersorTransform.h>
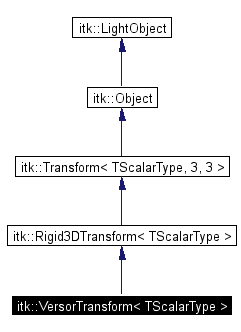
Inheritance diagram for itk::VersorTransform< TScalarType >:
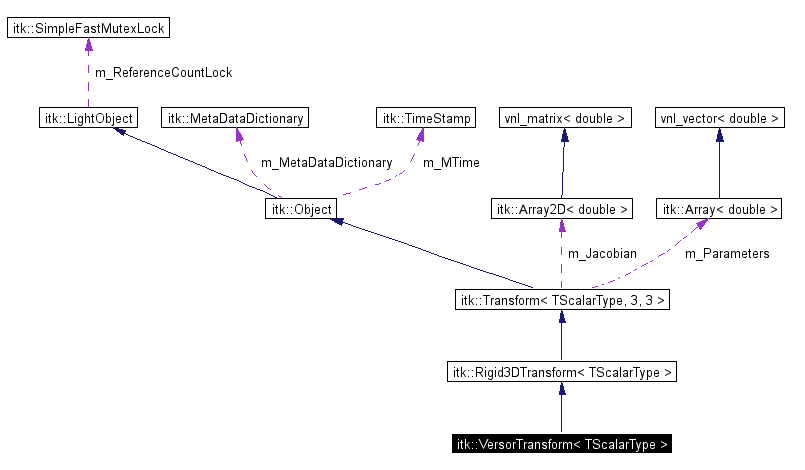
This transform applies a rotation and translation to the space
Definition at line 37 of file itkVersorTransform.h.
|
|||||
|
Definition at line 85 of file itkVersorTransform.h. |
|
|||||
|
Definition at line 84 of file itkVersorTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 123 of file itkVersorTransform.h. |
|
|||||
|
CovariantVector Type Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 107 of file itkVersorTransform.h. |
|
|||||
|
Point Type Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 95 of file itkVersorTransform.h. |
|
|||||
|
Vector Type Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 101 of file itkVersorTransform.h. |
|
|||||
|
VnlVector Type Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 113 of file itkVersorTransform.h. |
|
|||||
|
Jacobian Type Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 73 of file itkVersorTransform.h. |
|
|||||
|
Offset Type Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 90 of file itkVersorTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 108 of file itkVersorTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 96 of file itkVersorTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 102 of file itkVersorTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 114 of file itkVersorTransform.h. |
|
|||||
|
Parameters Type Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 67 of file itkVersorTransform.h. |
|
|||||
|
Smart pointer typedef support Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 122 of file itkVersorTransform.h. |
|
|||||
|
Scalar Type Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 61 of file itkVersorTransform.h. |
|
|||||
|
Standard Self Typedef Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 45 of file itkVersorTransform.h. Referenced by itk::VersorTransform< TScalarType >::~VersorTransform(). |
|
|||||
|
Standard "Superclass" typedef. Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 55 of file itkVersorTransform.h. |
|
|||||
|
Versor Type Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 83 of file itkVersorTransform.h. Referenced by itk::VersorTransform< TScalarType >::~VersorTransform(). |
|
|||||
|
VnlQuaternion Type Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 78 of file itkVersorTransform.h. |
|
|||||||||
|
Construct an VersorTransform object |
|
||||||||||
|
Copy a VersorTransform object This method creates a new VersorTransform object and initializes it to be a copy of an existing VersorTransform. |
|
|||||||||
|
Destroy an VersorTransform object Definition at line 194 of file itkVersorTransform.h. References itk::VersorTransform< TScalarType >::Self, and itk::VersorTransform< TScalarType >::VersorType. |
|
||||||||||
|
Compute Matrix Compute the components of the rotation matrix in the superclass |
|
|||||||||
|
Run-time type information (and related methods). Reimplemented from itk::Rigid3DTransform< TScalarType >.
|
|
||||||||||
|
Compute the Jacobian of the transformation This method computes the Jacobian matrix of the transformation. given point or vector, returning the transformed point or vector. The rank of the Jacobian will also indicate if the transform is invertible at this point. Reimplemented from itk::Rigid3DTransform< TScalarType >.
|
|
||||||||||||||||||||
|
|
|
||||||||||||||||||||
|
Dimension of parameters.
|
|
|||||||||
|
New macro for creation of through a Smart Pointer Reimplemented from itk::Rigid3DTransform< TScalarType >.
|
|
||||||||||
|
Assignment operator Reimplemented from itk::Rigid3DTransform< TScalarType >.
|
|
||||||||||||||||
|
Print contents of a VersorTransform Reimplemented from itk::Rigid3DTransform< TScalarType >.
|
|
||||||||||
|
Set the transformation from a container of parameters This is typically used by optimizers. There are 3 parameters. They represent the components of the right part of the versor. This can be seen as the components of the vector parallel to the rotation axis and multiplied by sin( angle / 2 ). Reimplemented from itk::Transform< TScalarType, 3, 3 >.
|
|
||||||||||||||||
|
Set the rotational part of the transform |
|
||||||||||
|
Set the rotational part of the transform |
 1.3.8 written by Dimitri van Heesch,
© 1997-2000
1.3.8 written by Dimitri van Heesch,
© 1997-2000