#include <itkAzimuthElevationToCartesianTransform.h>
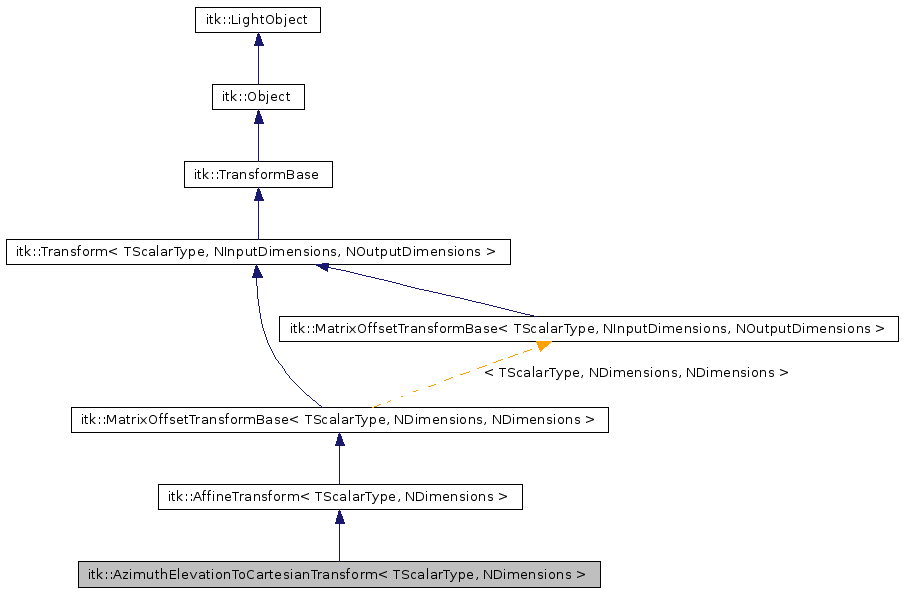
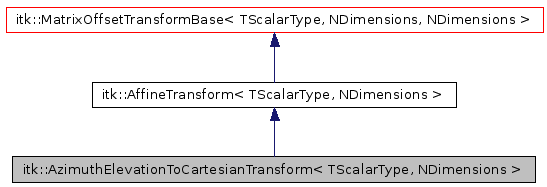
Inheritance diagram for itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >:
The three coordinate axis are azimuth, elevation, and range.
The azimuth elevation coordinate system is defined similarly to spherical coordinates but is slightly different in that the azimuth and elevation are measured in degrees between the r-axis (i.e z axis) and the projection on the x-z and y-z planes, respectively. Range, or r, is the distance from the origin.
The equations form performing the conversion from azimuth-elevation coordinates to cartesian coordinates are as follows: z = vcl_sqrt((r^2*(cos(azimuth))^2)/(1 + (cos(azimuth))^2 * (tan(elevation))^2); x = z * vcl_tan(azimuth) y = z * vcl_tan(elevation)
The reversed transforms are: azimuth = arctan(x/y) elevation = arctan(y/z) r = vcl_sqrt(x^2 + y^2 + z^2)
In this class, we can also set what a "forward" transform means. If we call SetForwardAzimuthElevationToCartesian(), a forward transform will return cartesian coordinates when passed azimuth,elevation,r coordinates. Calling SetForwardCartesianToAzimuthElevation() will cause the forward transform to return azimuth,elevation,r coordinates from cartesian coordinates.
Setting the FirstSampleDistance to a non-zero value means that a r value of 12 is actually (12 + FirstSampleDistance) distance from the origin.
There are two template parameters for this class:
ScalarT The type to be used for scalar numeric values. Either float or double.
NDimensions The number of dimensions of the vector space (must be >=3).
Definition at line 79 of file itkAzimuthElevationToCartesianTransform.h.
Public Types | |
| typedef Superclass::CenterType | CenterType |
| typedef SmartPointer< const Self > | ConstPointer |
| typedef Superclass::InputCovariantVectorType | InputCovariantVectorType |
| typedef Superclass::InputPointType | InputPointType |
| typedef Superclass::InputVectorType | InputVectorType |
| typedef Superclass::InputVnlVectorType | InputVnlVectorType |
| typedef Superclass::InverseMatrixType | InverseMatrixType |
| typedef Superclass::JacobianType | JacobianType |
| typedef Matrix< TScalarType, itkGetStaticConstMacro(SpaceDimension), itkGetStaticConstMacro(SpaceDimension)> | MatrixType |
| typedef Superclass::OffsetType | OffsetType |
| typedef Superclass::OutputCovariantVectorType | OutputCovariantVectorType |
| typedef Superclass::OutputPointType | OutputPointType |
| typedef Superclass::OutputVectorType | OutputVectorType |
| typedef Superclass::OutputVnlVectorType | OutputVnlVectorType |
| typedef Superclass::ParametersType | ParametersType |
| typedef SmartPointer< Self > | Pointer |
| typedef Superclass::ScalarType | ScalarType |
| typedef AzimuthElevationToCartesianTransform | Self |
| typedef AffineTransform< TScalarType, NDimensions > | Superclass |
| typedef Superclass::TranslationType | TranslationType |
Public Member Functions | |
| InputPointType | BackTransformPoint (const OutputPointType &point) const |
| void | Compose (const Self *other, bool pre=0) |
| virtual LightObject::Pointer | CreateAnother () const |
| virtual void | DebugOff () const |
| virtual void | DebugOn () const |
| virtual void | Delete () |
| const InputPointType & | GetCenter () const |
| Command * | GetCommand (unsigned long tag) |
| bool | GetDebug () const |
| virtual const ParametersType & | GetFixedParameters (void) const |
| unsigned int | GetInputSpaceDimension (void) const |
| bool | GetInverse (Self *inverse) const |
| const InverseMatrixType & | GetInverseMatrix (void) const |
| const JacobianType & | GetJacobian (const InputPointType &point) const |
| const MatrixType & | GetMatrix () const |
| const MetaDataDictionary & | GetMetaDataDictionary (void) const |
| MetaDataDictionary & | GetMetaDataDictionary (void) |
| virtual unsigned long | GetMTime () const |
| virtual const char * | GetNameOfClass () const |
| virtual unsigned int | GetNumberOfParameters (void) const |
| const OutputVectorType & | GetOffset (void) const |
| unsigned int | GetOutputSpaceDimension (void) const |
| const ParametersType & | GetParameters (void) const |
| virtual int | GetReferenceCount () const |
| virtual std::string | GetTransformTypeAsString () const |
| const OutputVectorType & | GetTranslation (void) const |
| bool | HasObserver (const EventObject &event) const |
| void | InvokeEvent (const EventObject &) const |
| void | InvokeEvent (const EventObject &) |
| virtual bool | IsLinear () const |
| itkStaticConstMacro (ParametersDimension, unsigned int, NOutputDimensions *(NInputDimensions+1)) | |
| itkStaticConstMacro (OutputSpaceDimension, unsigned int, NOutputDimensions) | |
| itkStaticConstMacro (InputSpaceDimension, unsigned int, NInputDimensions) | |
| ScalarType | Metric (void) const |
| ScalarType | Metric (const Self *other) const |
| virtual void | Modified () const |
| void | Print (std::ostream &os, Indent indent=0) const |
| virtual void | Register () const |
| void | RemoveAllObservers () |
| void | RemoveObserver (unsigned long tag) |
| void | Rotate2D (TScalarType angle, bool pre=0) |
| void | Rotate3D (const OutputVectorType &axis, TScalarType angle, bool pre=0) |
| virtual void | SetAzimuthAngularSeparation (double _arg) |
| void | SetAzimuthElevationToCartesianParameters (const double sampleSize, const double blanking, const long maxAzimuth, const long maxElevation) |
| void | SetAzimuthElevationToCartesianParameters (const double sampleSize, const double blanking, const long maxAzimuth, const long maxElevation, const double azimuthAngleSeparation, const double elevationAngleSeparation) |
| void | SetCenter (const InputPointType ¢er) |
| void | SetDebug (bool debugFlag) const |
| virtual void | SetElevationAngularSeparation (double _arg) |
| virtual void | SetFirstSampleDistance (double _arg) |
| virtual void | SetFixedParameters (const ParametersType &)=0 |
| virtual void | SetFixedParameters (const ParametersType &) |
| void | SetForwardAzimuthElevationToCartesian () |
| void | SetForwardCartesianToAzimuthElevation () |
| virtual void | SetIdentity (void) |
| virtual void | SetMatrix (const MatrixType &matrix) |
| virtual void | SetMaxAzimuth (long _arg) |
| virtual void | SetMaxElevation (long _arg) |
| void | SetMetaDataDictionary (const MetaDataDictionary &rhs) |
| void | SetOffset (const OutputVectorType &offset) |
| virtual void | SetParameters (const ParametersType &)=0 |
| void | SetParameters (const ParametersType ¶meters) |
| virtual void | SetParametersByValue (const ParametersType &p)=0 |
| virtual void | SetParametersByValue (const ParametersType &p) |
| virtual void | SetRadiusSampleSize (double _arg) |
| virtual void | SetReferenceCount (int) |
| void | SetTranslation (const OutputVectorType &translation) |
| void | Shear (int axis1, int axis2, TScalarType coef, bool pre=0) |
| OutputPointType | TransformAzElToCartesian (const InputPointType &point) const |
| OutputPointType | TransformCartesianToAzEl (const OutputPointType &point) const |
| OutputCovariantVectorType | TransformCovariantVector (const InputCovariantVectorType &vector) const |
| OutputPointType | TransformPoint (const InputPointType &point) const |
| OutputPointType | TransformPoint (const InputPointType &point) const |
| virtual OutputVnlVectorType | TransformVector (const InputVnlVectorType &) const |
| OutputVnlVectorType | TransformVector (const InputVnlVectorType &vector) const |
| OutputVectorType | TransformVector (const InputVectorType &vector) const |
| void | Translate (const OutputVectorType &offset, bool pre=0) |
| virtual void | UnRegister () const |
| unsigned long | AddObserver (const EventObject &event, Command *) const |
| unsigned long | AddObserver (const EventObject &event, Command *) |
| InputCovariantVectorType | BackTransform (const OutputCovariantVectorType &vector) const |
| InputVnlVectorType | BackTransform (const OutputVnlVectorType &vector) const |
| InputVectorType | BackTransform (const OutputVectorType &vector) const |
| InputPointType | BackTransform (const OutputPointType &point) const |
| itkStaticConstMacro (OutputSpaceDimension, unsigned int, NDimensions) | |
| itkStaticConstMacro (InputSpaceDimension, unsigned int, NDimensions) | |
| itkStaticConstMacro (ParametersDimension, unsigned int, NDimensions *(NDimensions+1)) | |
| itkStaticConstMacro (SpaceDimension, unsigned int, NDimensions) | |
| void | Rotate (int axis1, int axis2, TScalarType angle, bool pre=0) |
| void | Scale (const TScalarType &factor, bool pre=0) |
| void | Scale (const OutputVectorType &factor, bool pre=0) |
Static Public Member Functions | |
| static void | BreakOnError () |
| static Pointer | New () |
| static bool | GetGlobalWarningDisplay () |
| static void | GlobalWarningDisplayOff () |
| static void | GlobalWarningDisplayOn () |
| static void | SetGlobalWarningDisplay (bool flag) |
Protected Types | |
| typedef int | InternalReferenceCountType |
Protected Member Functions | |
| AzimuthElevationToCartesianTransform () | |
| virtual void | ComputeMatrix (void) |
| virtual void | ComputeMatrixParameters (void) |
| virtual void | ComputeOffset (void) |
| virtual void | ComputeTranslation (void) |
| const InverseMatrixType & | GetVarInverseMatrix (void) const |
| bool | InverseMatrixIsOld (void) const |
| bool | PrintObservers (std::ostream &os, Indent indent) const |
| void | PrintSelf (std::ostream &s, Indent indent) const |
| void | SetVarCenter (const InputPointType ¢er) |
| void | SetVarInverseMatrix (const InverseMatrixType &matrix) const |
| void | SetVarMatrix (const MatrixType &matrix) |
| void | SetVarOffset (const OutputVectorType &offset) |
| void | SetVarTranslation (const OutputVectorType &translation) |
| virtual | ~AzimuthElevationToCartesianTransform () |
| virtual void | PrintHeader (std::ostream &os, Indent indent) const |
| virtual void | PrintTrailer (std::ostream &os, Indent indent) const |
Protected Attributes | |
| ParametersType | m_FixedParameters |
| JacobianType | m_Jacobian |
| ParametersType | m_Parameters |
| InternalReferenceCountType | m_ReferenceCount |
| SimpleFastMutexLock | m_ReferenceCountLock |
typedef Superclass::CenterType itk::AffineTransform< TScalarType, NDimensions >::CenterType [inherited] |
Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, NDimensions, NDimensions >.
Reimplemented in itk::FixedCenterOfRotationAffineTransform< TScalarType, NDimensions >, and itk::ScalableAffineTransform< TScalarType, NDimensions >.
Definition at line 152 of file itkAffineTransform.h.
| typedef SmartPointer<const Self> itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::ConstPointer |
Reimplemented from itk::AffineTransform< TScalarType, NDimensions >.
Definition at line 87 of file itkAzimuthElevationToCartesianTransform.h.
typedef Superclass::InputCovariantVectorType itk::AffineTransform< TScalarType, NDimensions >::InputCovariantVectorType [inherited] |
Standard covariant vector type for this class
Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, NDimensions, NDimensions >.
Reimplemented in itk::CenteredAffineTransform< TScalarType, NDimensions >, itk::FixedCenterOfRotationAffineTransform< TScalarType, NDimensions >, and itk::ScalableAffineTransform< TScalarType, NDimensions >.
Definition at line 147 of file itkAffineTransform.h.
| typedef Superclass::InputPointType itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::InputPointType |
Standard coordinate point type for this class
Reimplemented from itk::AffineTransform< TScalarType, NDimensions >.
Definition at line 111 of file itkAzimuthElevationToCartesianTransform.h.
typedef Superclass::InputVectorType itk::AffineTransform< TScalarType, NDimensions >::InputVectorType [inherited] |
Standard vector type for this class
Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, NDimensions, NDimensions >.
Reimplemented in itk::CenteredAffineTransform< TScalarType, NDimensions >, itk::FixedCenterOfRotationAffineTransform< TScalarType, NDimensions >, and itk::ScalableAffineTransform< TScalarType, NDimensions >.
Definition at line 142 of file itkAffineTransform.h.
typedef Superclass::InputVnlVectorType itk::AffineTransform< TScalarType, NDimensions >::InputVnlVectorType [inherited] |
Standard vnl_vector type for this class
Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, NDimensions, NDimensions >.
Reimplemented in itk::CenteredAffineTransform< TScalarType, NDimensions >, itk::FixedCenterOfRotationAffineTransform< TScalarType, NDimensions >, and itk::ScalableAffineTransform< TScalarType, NDimensions >.
Definition at line 144 of file itkAffineTransform.h.
typedef int itk::LightObject::InternalReferenceCountType [protected, inherited] |
Define the type of the reference count according to the target. This allows the use of atomic operations
Definition at line 139 of file itkLightObject.h.
typedef Superclass::InverseMatrixType itk::AffineTransform< TScalarType, NDimensions >::InverseMatrixType [inherited] |
Standard inverse matrix type for this class
Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, NDimensions, NDimensions >.
Reimplemented in itk::FixedCenterOfRotationAffineTransform< TScalarType, NDimensions >, and itk::ScalableAffineTransform< TScalarType, NDimensions >.
Definition at line 151 of file itkAffineTransform.h.
| typedef Superclass::JacobianType itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::JacobianType |
Jacobian type.
Reimplemented from itk::AffineTransform< TScalarType, NDimensions >.
Definition at line 105 of file itkAzimuthElevationToCartesianTransform.h.
| typedef Matrix<TScalarType, itkGetStaticConstMacro(SpaceDimension), itkGetStaticConstMacro(SpaceDimension)> itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::MatrixType |
Standard matrix type for this class.
Reimplemented from itk::AffineTransform< TScalarType, NDimensions >.
Definition at line 116 of file itkAzimuthElevationToCartesianTransform.h.
typedef Superclass::OffsetType itk::AffineTransform< TScalarType, NDimensions >::OffsetType [inherited] |
Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, NDimensions, NDimensions >.
Reimplemented in itk::CenteredAffineTransform< TScalarType, NDimensions >, itk::FixedCenterOfRotationAffineTransform< TScalarType, NDimensions >, and itk::ScalableAffineTransform< TScalarType, NDimensions >.
Definition at line 153 of file itkAffineTransform.h.
typedef Superclass::OutputCovariantVectorType itk::AffineTransform< TScalarType, NDimensions >::OutputCovariantVectorType [inherited] |
Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, NDimensions, NDimensions >.
Reimplemented in itk::CenteredAffineTransform< TScalarType, NDimensions >, itk::FixedCenterOfRotationAffineTransform< TScalarType, NDimensions >, and itk::ScalableAffineTransform< TScalarType, NDimensions >.
Definition at line 149 of file itkAffineTransform.h.
| typedef Superclass::OutputPointType itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::OutputPointType |
Reimplemented from itk::AffineTransform< TScalarType, NDimensions >.
Definition at line 112 of file itkAzimuthElevationToCartesianTransform.h.
typedef Superclass::OutputVectorType itk::AffineTransform< TScalarType, NDimensions >::OutputVectorType [inherited] |
Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, NDimensions, NDimensions >.
Reimplemented in itk::CenteredAffineTransform< TScalarType, NDimensions >, itk::FixedCenterOfRotationAffineTransform< TScalarType, NDimensions >, and itk::ScalableAffineTransform< TScalarType, NDimensions >.
Definition at line 143 of file itkAffineTransform.h.
typedef Superclass::OutputVnlVectorType itk::AffineTransform< TScalarType, NDimensions >::OutputVnlVectorType [inherited] |
Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, NDimensions, NDimensions >.
Reimplemented in itk::CenteredAffineTransform< TScalarType, NDimensions >, itk::FixedCenterOfRotationAffineTransform< TScalarType, NDimensions >, and itk::ScalableAffineTransform< TScalarType, NDimensions >.
Definition at line 145 of file itkAffineTransform.h.
| typedef Superclass::ParametersType itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::ParametersType |
Parameters type.
Reimplemented from itk::AffineTransform< TScalarType, NDimensions >.
Definition at line 99 of file itkAzimuthElevationToCartesianTransform.h.
| typedef SmartPointer<Self> itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::Pointer |
Reimplemented from itk::AffineTransform< TScalarType, NDimensions >.
Definition at line 86 of file itkAzimuthElevationToCartesianTransform.h.
| typedef Superclass::ScalarType itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::ScalarType |
Standard scalar type for this class.
Reimplemented from itk::AffineTransform< TScalarType, NDimensions >.
Definition at line 108 of file itkAzimuthElevationToCartesianTransform.h.
| typedef AzimuthElevationToCartesianTransform itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::Self |
Standard class typedefs.
Reimplemented from itk::AffineTransform< TScalarType, NDimensions >.
Definition at line 84 of file itkAzimuthElevationToCartesianTransform.h.
| typedef AffineTransform< TScalarType, NDimensions > itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::Superclass |
Reimplemented from itk::AffineTransform< TScalarType, NDimensions >.
Definition at line 85 of file itkAzimuthElevationToCartesianTransform.h.
typedef Superclass::TranslationType itk::AffineTransform< TScalarType, NDimensions >::TranslationType [inherited] |
Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, NDimensions, NDimensions >.
Reimplemented in itk::FixedCenterOfRotationAffineTransform< TScalarType, NDimensions >, and itk::ScalableAffineTransform< TScalarType, NDimensions >.
Definition at line 154 of file itkAffineTransform.h.
| itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::AzimuthElevationToCartesianTransform | ( | ) | [protected] |
Create an AzimuthElevationToCartesianTransform object.
| virtual itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::~AzimuthElevationToCartesianTransform | ( | ) | [protected, virtual] |
Destroy an AzimuthElevationToCartesianTransform object.
| unsigned long itk::Object::AddObserver | ( | const EventObject & | event, | |
| Command * | ||||
| ) | const [inherited] |
| unsigned long itk::Object::AddObserver | ( | const EventObject & | event, | |
| Command * | ||||
| ) | [inherited] |
Allow people to add/remove/invoke observers (callbacks) to any ITK object. This is an implementation of the subject/observer design pattern. An observer is added by specifying an event to respond to and an itk::Command to execute. It returns an unsigned long tag which can be used later to remove the event or retrieve the command. The memory for the Command becomes the responsibility of this object, so don't pass the same instance of a command to two different objects
| AffineTransform< TScalarType, NDimensions >::InputCovariantVectorType itk::AffineTransform< TScalarType, NDimensions >::BackTransform | ( | const OutputCovariantVectorType & | vec | ) | const [inline, inherited] |
Back Transform a CovariantVector
Definition at line 348 of file itkAffineTransform.h.
References itkWarningMacro.
| AffineTransform< TScalarType, NDimensions >::InputVnlVectorType itk::AffineTransform< TScalarType, NDimensions >::BackTransform | ( | const OutputVnlVectorType & | vect | ) | const [inline, inherited] |
Back transform a vnl_vector
Definition at line 333 of file itkAffineTransform.h.
References itk::MatrixOffsetTransformBase< TScalarType, NDimensions, NDimensions >::GetInverseMatrix(), and itkWarningMacro.
| AffineTransform< TScalarType, NDimensions >::InputVectorType itk::AffineTransform< TScalarType, NDimensions >::BackTransform | ( | const OutputVectorType & | vect | ) | const [inline, inherited] |
Back transform a vector
Definition at line 318 of file itkAffineTransform.h.
References itk::MatrixOffsetTransformBase< TScalarType, NDimensions, NDimensions >::GetInverseMatrix(), and itkWarningMacro.
| InputPointType itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::BackTransform | ( | const OutputPointType & | point | ) | const [inline] |
Back transform from cartesian to azimuth-elevation.
Reimplemented from itk::AffineTransform< TScalarType, NDimensions >.
Definition at line 136 of file itkAzimuthElevationToCartesianTransform.h.
| InputPointType itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::BackTransformPoint | ( | const OutputPointType & | point | ) | const [inline] |
Back transform a point by an affine transform
This method finds the point that maps to a given point under the affine transformation defined by self. If no such point exists, an exception is thrown. The returned value is (a pointer to) a brand new point created with new.
Reimplemented from itk::AffineTransform< TScalarType, NDimensions >.
Definition at line 151 of file itkAzimuthElevationToCartesianTransform.h.
| static void itk::LightObject::BreakOnError | ( | ) | [static, inherited] |
This method is called when itkExceptionMacro executes. It allows the debugger to break on error.
| void itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::Compose | ( | const Self * | other, | |
| bool | pre = 0 | |||
| ) | [inherited] |
Compose with another MatrixOffsetTransformBase
This method composes self with another MatrixOffsetTransformBase of the same dimension, modifying self to be the composition of self and other. If the argument pre is true, then other is precomposed with self; that is, the resulting transformation consists of first applying other to the source, followed by self. If pre is false or omitted, then other is post-composed with self; that is the resulting transformation consists of first applying self to the source, followed by other. This updates the Translation based on current center.
| virtual void itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::ComputeMatrix | ( | void | ) | [protected, virtual, inherited] |
Reimplemented in itk::ScalableAffineTransform< TScalarType, NDimensions >.
| virtual void itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::ComputeMatrixParameters | ( | void | ) | [protected, virtual, inherited] |
| virtual void itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::ComputeOffset | ( | void | ) | [protected, virtual, inherited] |
| virtual void itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::ComputeTranslation | ( | void | ) | [protected, virtual, inherited] |
| virtual LightObject::Pointer itk::Object::CreateAnother | ( | ) | const [virtual, inherited] |
Create an object from an instance, potentially deferring to a factory. This method allows you to create an instance of an object that is exactly the same type as the referring object. This is useful in cases where an object has been cast back to a base class.
Reimplemented from itk::LightObject.
| virtual void itk::Object::DebugOff | ( | ) | const [virtual, inherited] |
Turn debugging output off.
| virtual void itk::Object::DebugOn | ( | ) | const [virtual, inherited] |
Turn debugging output on.
| virtual void itk::LightObject::Delete | ( | ) | [virtual, inherited] |
Delete an itk object. This method should always be used to delete an object when the new operator was used to create it. Using the C delete method will not work with reference counting.
| const InputPointType& itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::GetCenter | ( | void | ) | const [inline, inherited] |
Get center of rotation of the MatrixOffsetTransformBase
This method returns the point used as the fixed center of rotation for the MatrixOffsetTransformBase. To define an affine transform, you must set the matrix, center, and translation OR the matrix and offset
Definition at line 250 of file itkMatrixOffsetTransformBase.h.
| Command* itk::Object::GetCommand | ( | unsigned long | tag | ) | [inherited] |
Get the command associated with the given tag. NOTE: This returns a pointer to a Command, but it is safe to asign this to a Command::Pointer. Since Command inherits from LightObject, at this point in the code, only a pointer or a reference to the Command can be used.
| bool itk::Object::GetDebug | ( | ) | const [inherited] |
Get the value of the debug flag.
| virtual const ParametersType& itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::GetFixedParameters | ( | void | ) | const [virtual, inherited] |
Get the Fixed Parameters.
Reimplemented from itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >.
| static bool itk::Object::GetGlobalWarningDisplay | ( | ) | [static, inherited] |
| unsigned int itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >::GetInputSpaceDimension | ( | void | ) | const [inline, virtual, inherited] |
Get the size of the input space
Implements itk::TransformBase.
Definition at line 87 of file itkTransform.h.
| bool itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::GetInverse | ( | Self * | inverse | ) | const [inherited] |
Create inverse of an affine transformation
This populates the parameters an affine transform such that the transform is the inverse of self. If self is not invertible, an exception is thrown. Note that by default the inverese transform is centered at the origin. If you need to compute the inverse centered at a point, p,
transform2->SetCenter( p ); transform1->GetInverse( transform2 );
transform2 will now contain the inverse of transform1 and will with its center set to p. Flipping the two statements will produce an incorrect transform.
Reimplemented from itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >.
| const InverseMatrixType& itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::GetInverseMatrix | ( | void | ) | const [inherited] |
Referenced by itk::AffineTransform< TScalarType, NDimensions >::BackTransform().
| const JacobianType& itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::GetJacobian | ( | const InputPointType & | point | ) | const [virtual, inherited] |
Compute the Jacobian of the transformation
This method computes the Jacobian matrix of the transformation. given point or vector, returning the transformed point or vector. The rank of the Jacobian will also indicate if the transform is invertible at this point.
Reimplemented from itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >.
| const MatrixType& itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::GetMatrix | ( | void | ) | const [inline, inherited] |
Get matrix of an MatrixOffsetTransformBase
This method returns the value of the matrix of the MatrixOffsetTransformBase. To define an affine transform, you must set the matrix, center, and translation OR the matrix and offset
Definition at line 193 of file itkMatrixOffsetTransformBase.h.
| const MetaDataDictionary& itk::Object::GetMetaDataDictionary | ( | void | ) | const [inherited] |
| MetaDataDictionary& itk::Object::GetMetaDataDictionary | ( | void | ) | [inherited] |
| virtual unsigned long itk::Object::GetMTime | ( | ) | const [virtual, inherited] |
Return this objects modified time.
Reimplemented in itk::ImageRegistrationMethod< TFixedImage, TMovingImage >, itk::ImageToSpatialObjectRegistrationMethod< TFixedImage, TMovingSpatialObject >, itk::MultiResolutionImageRegistrationMethod< TFixedImage, TMovingImage >, itk::PointSetToImageRegistrationMethod< TFixedPointSet, TMovingImage >, itk::PointSetToPointSetRegistrationMethod< TFixedPointSet, TMovingPointSet >, itk::DeformationFieldSource< TOutputImage >, itk::InverseDeformationFieldImageFilter< TInputImage, TOutputImage >, itk::ResampleImageFilter< TInputImage, TOutputImage, TInterpolatorPrecisionType >, itk::VectorResampleImageFilter< TInputImage, TOutputImage, TInterpolatorPrecisionType >, itk::BoundingBox< TPointIdentifier, VPointDimension, TCoordRep, TPointsContainer >, itk::ImageAdaptor< TImage, TAccessor >, itk::ResampleImageFilter< TInputImage, TOutputImage, TInterpolatorPrecisionType >, itk::TransformToDeformationFieldSource< TOutputImage, TTransformPrecisionType >, itk::ImageSpatialObject< TDimension, TPixelType >, itk::MeshSpatialObject< TMesh >, itk::SceneSpatialObject< TSpaceDimension >, itk::SpatialObject< TDimension >, itk::ImageAdaptor< TImage, itk::Accessor::AsinPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::AbsPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::LogPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::ComplexToPhasePixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::Log10PixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::ExpPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::AddPixelAccessor< TImage::PixelType > >, itk::ImageAdaptor< itk::VectorImage< TPixelType, Dimension >, itk::Accessor::VectorImageToImagePixelAccessor< TPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::RGBToVectorPixelAccessor< TImage::PixelType::ComponentType > >, itk::ImageAdaptor< TImage, itk::PixelAccessor< TInternalType, TExternalType > >, itk::ImageAdaptor< TImage, itk::Accessor::SqrtPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::AcosPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::ComplexToModulusPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::ExpNegativePixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::VectorToRGBPixelAccessor< TImage::PixelType::ValueType > >, itk::ImageAdaptor< TImage, itk::Accessor::TanPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::ComplexToRealPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::RGBToLuminancePixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::AtanPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::SinPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::ComplexToImaginaryPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::CosPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageSpatialObject< TDimension, unsigned char >, itk::SpatialObject< 3 >, and itk::SpatialObject< ::itk::GetMeshDimension< TMesh >::PointDimension >.
Referenced by itk::SpatialObject< ::itk::GetMeshDimension< TMesh >::PointDimension >::GetObjectMTime().
| virtual const char* itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::GetNameOfClass | ( | ) | const [virtual] |
Run-time type information (and related methods).
Reimplemented from itk::AffineTransform< TScalarType, NDimensions >.
| virtual unsigned int itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >::GetNumberOfParameters | ( | void | ) | const [inline, virtual, inherited] |
Return the number of parameters that completely define the Transfom
Implements itk::TransformBase.
Reimplemented in itk::BSplineDeformableTransform< TScalarType, NDimensions, VSplineOrder >, and itk::TranslationTransform< TScalarType, NDimensions >.
Definition at line 216 of file itkTransform.h.
| const OutputVectorType& itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::GetOffset | ( | void | ) | const [inline, inherited] |
Get offset of an MatrixOffsetTransformBase
This method returns the offset value of the MatrixOffsetTransformBase. To define an affine transform, you must set the matrix, center, and translation OR the matrix and offset
Definition at line 214 of file itkMatrixOffsetTransformBase.h.
| unsigned int itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >::GetOutputSpaceDimension | ( | void | ) | const [inline, virtual, inherited] |
Get the size of the output space
Implements itk::TransformBase.
Definition at line 90 of file itkTransform.h.
| const ParametersType& itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::GetParameters | ( | void | ) | const [virtual, inherited] |
Get the Transformation Parameters.
Reimplemented from itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >.
Reimplemented in itk::CenteredAffineTransform< TScalarType, NDimensions >.
| virtual int itk::LightObject::GetReferenceCount | ( | ) | const [inline, virtual, inherited] |
Gets the reference count on this object.
Definition at line 106 of file itkLightObject.h.
| virtual std::string itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >::GetTransformTypeAsString | ( | ) | const [virtual, inherited] |
Generate a platform independant name
Implements itk::TransformBase.
| const OutputVectorType& itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::GetTranslation | ( | void | ) | const [inline, inherited] |
Get translation component of the MatrixOffsetTransformBase
This method returns the translation used after rotation about the center point. To define an affine transform, you must set the matrix, center, and translation OR the matrix and offset
Definition at line 270 of file itkMatrixOffsetTransformBase.h.
| const InverseMatrixType& itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::GetVarInverseMatrix | ( | void | ) | const [inline, protected, inherited] |
Definition at line 380 of file itkMatrixOffsetTransformBase.h.
| static void itk::Object::GlobalWarningDisplayOff | ( | ) | [inline, static, inherited] |
| static void itk::Object::GlobalWarningDisplayOn | ( | ) | [inline, static, inherited] |
| bool itk::Object::HasObserver | ( | const EventObject & | event | ) | const [inherited] |
Return true if an observer is registered for this event.
| bool itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::InverseMatrixIsOld | ( | void | ) | const [inline, protected, inherited] |
Definition at line 384 of file itkMatrixOffsetTransformBase.h.
| void itk::Object::InvokeEvent | ( | const EventObject & | ) | const [inherited] |
Call Execute on all the Commands observing this event id. The actions triggered by this call doesn't modify this object.
| void itk::Object::InvokeEvent | ( | const EventObject & | ) | [inherited] |
Call Execute on all the Commands observing this event id.
| virtual bool itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::IsLinear | ( | ) | const [inline, virtual, inherited] |
Indicates that this transform is linear. That is, given two points P and Q, and scalar coefficients a and b, then
T( a*P + b*Q ) = a * T(P) + b * T(Q)
Reimplemented from itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >.
Definition at line 357 of file itkMatrixOffsetTransformBase.h.
| itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::itkStaticConstMacro | ( | ParametersDimension | , | |
| unsigned | int, | |||
| NOutputDimensions * | (NInputDimensions+1) | |||
| ) | [inherited] |
| itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::itkStaticConstMacro | ( | OutputSpaceDimension | , | |
| unsigned | int, | |||
| NOutputDimensions | ||||
| ) | [inherited] |
Reimplemented from itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >.
| itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::itkStaticConstMacro | ( | InputSpaceDimension | , | |
| unsigned | int, | |||
| NInputDimensions | ||||
| ) | [inherited] |
Dimension of the domain space.
Reimplemented from itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >.
| itk::AffineTransform< TScalarType, NDimensions >::itkStaticConstMacro | ( | OutputSpaceDimension | , | |
| unsigned | int, | |||
| NDimensions | ||||
| ) | [inherited] |
| itk::AffineTransform< TScalarType, NDimensions >::itkStaticConstMacro | ( | InputSpaceDimension | , | |
| unsigned | int, | |||
| NDimensions | ||||
| ) | [inherited] |
Dimension of the domain space.
Reimplemented in itk::FixedCenterOfRotationAffineTransform< TScalarType, NDimensions >, and itk::ScalableAffineTransform< TScalarType, NDimensions >.
| itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::itkStaticConstMacro | ( | ParametersDimension | , | |
| unsigned | int, | |||
| NDimensions * | (NDimensions+1) | |||
| ) |
Reimplemented from itk::AffineTransform< TScalarType, NDimensions >.
| itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::itkStaticConstMacro | ( | SpaceDimension | , | |
| unsigned | int, | |||
| NDimensions | ||||
| ) |
Dimension of the domain space.
Reimplemented from itk::AffineTransform< TScalarType, NDimensions >.
| ScalarType itk::AffineTransform< TScalarType, NDimensions >::Metric | ( | void | ) | const [inherited] |
This method computes the distance from self to the identity transformation, using the same metric as the one-argument form of the Metric() method.
| ScalarType itk::AffineTransform< TScalarType, NDimensions >::Metric | ( | const Self * | other | ) | const [inherited] |
Compute distance between two affine transformations
This method computes a ``distance'' between two affine transformations. This distance is guaranteed to be a metric, but not any particular metric. (At the moment, the algorithm is to collect all the elements of the matrix and offset into a vector, and compute the euclidean (L2) norm of that vector. Some metric which could be used to estimate the distance between two points transformed by the affine transformation would be more useful, but I don't have time right now to work out the mathematical details.)
| virtual void itk::Object::Modified | ( | ) | const [virtual, inherited] |
Update the modification time for this object. Many filters rely on the modification time to determine if they need to recompute their data.
Reimplemented in itk::NormalizeImageFilter< TInputImage, TOutputImage >, itk::ImageAdaptor< TImage, TAccessor >, itk::ImageAdaptor< TImage, itk::Accessor::AsinPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::AbsPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::LogPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::ComplexToPhasePixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::Log10PixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::ExpPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::AddPixelAccessor< TImage::PixelType > >, itk::ImageAdaptor< itk::VectorImage< TPixelType, Dimension >, itk::Accessor::VectorImageToImagePixelAccessor< TPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::RGBToVectorPixelAccessor< TImage::PixelType::ComponentType > >, itk::ImageAdaptor< TImage, itk::PixelAccessor< TInternalType, TExternalType > >, itk::ImageAdaptor< TImage, itk::Accessor::SqrtPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::AcosPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::ComplexToModulusPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::ExpNegativePixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::VectorToRGBPixelAccessor< TImage::PixelType::ValueType > >, itk::ImageAdaptor< TImage, itk::Accessor::TanPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::ComplexToRealPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::RGBToLuminancePixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::AtanPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::SinPixelAccessor< TImage::PixelType, TOutputPixelType > >, itk::ImageAdaptor< TImage, itk::Accessor::ComplexToImaginaryPixelAccessor< TImage::PixelType, TOutputPixelType > >, and itk::ImageAdaptor< TImage, itk::Accessor::CosPixelAccessor< TImage::PixelType, TOutputPixelType > >.
Referenced by itk::NarrowBandImageFilterBase< TInputImage, itk::Image< TOutputPixelType,::itk::GetImageDimension< TInputImage >::ImageDimension > >::InsertNarrowBandNode(), itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >::SetCenter(), itk::HistogramAlgorithmBase< TInputHistogram >::SetInputHistogram(), itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >::SetMatrix(), itk::NarrowBandImageFilterBase< TInputImage, itk::Image< TOutputPixelType,::itk::GetImageDimension< TInputImage >::ImageDimension > >::SetNarrowBand(), itk::NarrowBandImageFilterBase< TInputImage, itk::Image< TOutputPixelType,::itk::GetImageDimension< TInputImage >::ImageDimension > >::SetNarrowBandInnerRadius(), itk::NarrowBandImageFilterBase< TInputImage, itk::Image< TOutputPixelType,::itk::GetImageDimension< TInputImage >::ImageDimension > >::SetNarrowBandTotalRadius(), itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >::SetOffset(), itk::ThresholdLabelerImageFilter< TInputImage, TOutputImage >::SetRealThresholds(), itk::CollidingFrontsImageFilter< TInputImage, TOutputImage >::SetSeedPoints1(), itk::CollidingFrontsImageFilter< TInputImage, TOutputImage >::SetSeedPoints2(), itk::NonUniformBSpline< TDimension >::SetSplineOrder(), itk::ThresholdLabelerImageFilter< TInputImage, TOutputImage >::SetThresholds(), itk::Statistics::GoodnessOfFitFunctionBase< TInputHistogram >::SetTotalObservedScale(), and itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >::SetTranslation().
| static Pointer itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::New | ( | ) | [static] |
New macro for creation of through a Smart Pointer.
Reimplemented from itk::AffineTransform< TScalarType, NDimensions >.
| void itk::LightObject::Print | ( | std::ostream & | os, | |
| Indent | indent = 0 | |||
| ) | const [inherited] |
Cause the object to print itself out.
Referenced by itk::WeakPointer< itk::ProcessObject >::Print().
| virtual void itk::LightObject::PrintHeader | ( | std::ostream & | os, | |
| Indent | indent | |||
| ) | const [protected, virtual, inherited] |
| bool itk::Object::PrintObservers | ( | std::ostream & | os, | |
| Indent | indent | |||
| ) | const [protected, inherited] |
| void itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::PrintSelf | ( | std::ostream & | s, | |
| Indent | indent | |||
| ) | const [protected, virtual] |
Print contents of an AzimuthElevationTransform.
Reimplemented from itk::AffineTransform< TScalarType, NDimensions >.
| virtual void itk::LightObject::PrintTrailer | ( | std::ostream & | os, | |
| Indent | indent | |||
| ) | const [protected, virtual, inherited] |
| virtual void itk::Object::Register | ( | ) | const [virtual, inherited] |
Increase the reference count (mark as used by another object).
Reimplemented from itk::LightObject.
| void itk::Object::RemoveAllObservers | ( | ) | [inherited] |
Remove all observers .
| void itk::Object::RemoveObserver | ( | unsigned long | tag | ) | [inherited] |
Remove the observer with this tag value.
| void itk::AffineTransform< TScalarType, NDimensions >::Rotate | ( | int | axis1, | |
| int | axis2, | |||
| TScalarType | angle, | |||
| bool | pre = 0 | |||
| ) | [inherited] |
Compose affine transformation with an elementary rotation
This method composes self with a rotation that affects two specified axes, replacing the current value of self. The rotation angle is in radians. The axis of rotation goes through the origin. The transformation is given by
y[axis1] = vcl_cos(angle)*x[axis1] + vcl_sin(angle)*x[axis2] y[axis2] = -sin(angle)*x[axis1] + vcl_cos(angle)*x[axis2].
All coordinates other than axis1 and axis2 are unchanged; a rotation of pi/2 radians will carry +axis1 into +axis2. The rotation is precomposed with self if pre is true, and postcomposed otherwise. Note that the rotation is applied centered at the origin.
| void itk::AffineTransform< TScalarType, NDimensions >::Rotate2D | ( | TScalarType | angle, | |
| bool | pre = 0 | |||
| ) | [inherited] |
Compose 2D affine transformation with a rotation
This method composes self, which must be a 2D affine transformation, with a clockwise rotation through a given angle in radians. The center of rotation is the origin. The rotation is precomposed with self if pre is true, and postcomposed otherwise. Note that the rotation is applied centered at the origin.
| void itk::AffineTransform< TScalarType, NDimensions >::Rotate3D | ( | const OutputVectorType & | axis, | |
| TScalarType | angle, | |||
| bool | pre = 0 | |||
| ) | [inherited] |
Compose 3D affine transformation with a rotation
This method composes self, which must be a 3D affine transformation, with a clockwise rotation around a specified axis. The rotation angle is in radians; the axis of rotation goes through the origin. The rotation is precomposed with self if pre is true, and postcomposed otherwise. Note that the rotation is applied centered at the origin.
| void itk::AffineTransform< TScalarType, NDimensions >::Scale | ( | const TScalarType & | factor, | |
| bool | pre = 0 | |||
| ) | [inherited] |
| void itk::AffineTransform< TScalarType, NDimensions >::Scale | ( | const OutputVectorType & | factor, | |
| bool | pre = 0 | |||
| ) | [inherited] |
Compose affine transformation with a scaling
This method modifies self to magnify the source by a given factor along each axis. If all factors are the same, or only a single factor is given, then the scaling is isotropic; otherwise it is anisotropic. If an odd number of factors are negative, then the parity of the image changes. If any of the factors is zero, then the transformation becomes a projection and is not invertible. The scaling is precomposed with self if pre is true, and postcomposed otherwise. Note that the scaling is applied centered at the origin.
| virtual void itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::SetAzimuthAngularSeparation | ( | double | _arg | ) | [virtual] |
Set the number of degrees between each azimuth unit.
| void itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::SetAzimuthElevationToCartesianParameters | ( | const double | sampleSize, | |
| const double | blanking, | |||
| const long | maxAzimuth, | |||
| const long | maxElevation | |||
| ) |
| void itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::SetAzimuthElevationToCartesianParameters | ( | const double | sampleSize, | |
| const double | blanking, | |||
| const long | maxAzimuth, | |||
| const long | maxElevation, | |||
| const double | azimuthAngleSeparation, | |||
| const double | elevationAngleSeparation | |||
| ) |
Set the transformation parameters.
| void itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::SetCenter | ( | const InputPointType & | center | ) | [inline, inherited] |
Set center of rotation of an MatrixOffsetTransformBase
This method sets the center of rotation of an MatrixOffsetTransformBase to a fixed point - for most transforms derived from this class, this point is not a "parameter" of the transform - the exception is that "centered" transforms have center as a parameter during optimization.
This method updates offset wrt to current translation and matrix. That is, changing the center changes the transform!
WARNING: When using the Center, we strongly recommend only changing the matrix and translation to define a transform. Changing a transform's center, changes the mapping between spaces - specifically, translation is not changed with respect to that new center, and so the offset is updated to * maintain the consistency with translation. If a center is not used, or is set before the matrix and the offset, then it is safe to change the offset directly. As a rule of thumb, if you wish to set the center explicitly, set before Offset computations are done.
To define an affine transform, you must set the matrix, center, and translation OR the matrix and offset
Definition at line 239 of file itkMatrixOffsetTransformBase.h.
| void itk::Object::SetDebug | ( | bool | debugFlag | ) | const [inherited] |
Set the value of the debug flag. A non-zero value turns debugging on.
| virtual void itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::SetElevationAngularSeparation | ( | double | _arg | ) | [virtual] |
Set the number of degrees between each elevation unit.
| virtual void itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::SetFirstSampleDistance | ( | double | _arg | ) | [virtual] |
Set the distance to add to the radius.
| virtual void itk::TransformBase::SetFixedParameters | ( | const ParametersType & | ) | [pure virtual, inherited] |
Set the fixed parameters.
Implemented in itk::TranslationTransform< TScalarType, NDimensions >, itk::Transform< TScalarType, NDimensions, NDimensions >, and itk::Transform< TScalarType, 3, 2 >.
| virtual void itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::SetFixedParameters | ( | const ParametersType & | ) | [virtual, inherited] |
Set the fixed parameters and update internal transformation.
Reimplemented from itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >.
| void itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::SetForwardAzimuthElevationToCartesian | ( | ) |
Defines that the forward transform goes from azimuth,elevation to cartesian.
| void itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::SetForwardCartesianToAzimuthElevation | ( | ) |
Defines that the forward transform goes from cartesian to azimuth, elevation.
| static void itk::Object::SetGlobalWarningDisplay | ( | bool | flag | ) | [static, inherited] |
This is a global flag that controls whether any debug, warning or error messages are displayed.
Referenced by itk::Object::GlobalWarningDisplayOff(), and itk::Object::GlobalWarningDisplayOn().
| virtual void itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::SetIdentity | ( | void | ) | [virtual, inherited] |
Set the transformation to an Identity
This sets the matrix to identity and the Offset to null.
Reimplemented in itk::ScalableAffineTransform< TScalarType, NDimensions >.
| virtual void itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::SetMatrix | ( | const MatrixType & | matrix | ) | [inline, virtual, inherited] |
Set matrix of an MatrixOffsetTransformBase
This method sets the matrix of an MatrixOffsetTransformBase to a value specified by the user.
This updates the Offset wrt to current translation and center. See the warning regarding offset-versus-translation in the documentation for SetCenter.
To define an affine transform, you must set the matrix, center, and translation OR the matrix and offset
Definition at line 181 of file itkMatrixOffsetTransformBase.h.
| virtual void itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::SetMaxAzimuth | ( | long | _arg | ) | [virtual] |
Set the maximum azimuth. The maximum azimuth and elevation can be set so that the resulting cartesian space is symmetric about the z axis. Therefore, the line defined by azimuth/2,elevation/2 = z-axis.
| virtual void itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::SetMaxElevation | ( | long | _arg | ) | [virtual] |
Set the maximum elevation The maximum azimuth and elevation can be set so that the resulting cartesian space is symmetric about the z axis. Therefore, the line defined by azimuth/2,elevation/2 = z-axis.
| void itk::Object::SetMetaDataDictionary | ( | const MetaDataDictionary & | rhs | ) | [inherited] |
| void itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::SetOffset | ( | const OutputVectorType & | offset | ) | [inline, inherited] |
Set offset (origin) of an MatrixOffset TransformBase.
This method sets the offset of an MatrixOffsetTransformBase to a value specified by the user. This updates Translation wrt current center. See the warning regarding offset-versus-translation in the documentation for SetCenter. To define an affine transform, you must set the matrix, center, and translation OR the matrix and offset
Definition at line 204 of file itkMatrixOffsetTransformBase.h.
| virtual void itk::TransformBase::SetParameters | ( | const ParametersType & | ) | [pure virtual, inherited] |
Set the transformation parameters and update internal transformation.
Implemented in itk::TranslationTransform< TScalarType, NDimensions >, itk::Transform< TScalarType, NDimensions, NDimensions >, and itk::Transform< TScalarType, 3, 2 >.
| void itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::SetParameters | ( | const ParametersType & | parameters | ) | [virtual, inherited] |
Set the transformation from a container of parameters. The first (NOutputDimension x NInputDimension) parameters define the matrix and the last NOutputDimension parameters the translation. Offset is updated based on current center.
Reimplemented from itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >.
Reimplemented in itk::CenteredAffineTransform< TScalarType, NDimensions >.
| virtual void itk::TransformBase::SetParametersByValue | ( | const ParametersType & | p | ) | [pure virtual, inherited] |
Set the transformation by copying parameters and update internal transformation. This method forces the transform to copy the parameters. The default implementation is to call SetParameters. This call must be overridden if the transform normally implements SetParameters by keeping a reference to the parameters.
Implemented in itk::Transform< TScalarType, NDimensions, NDimensions >, and itk::Transform< TScalarType, 3, 2 >.
| virtual void itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >::SetParametersByValue | ( | const ParametersType & | p | ) | [inline, virtual, inherited] |
Set the transformation parameters and update internal transformation. This method forces the transform to copy the parameters. The default implementation is to call SetParameters. This call must be overridden if the transform normally implements SetParameters by keeping a reference to the parameters.
Definition at line 151 of file itkTransform.h.
| virtual void itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::SetRadiusSampleSize | ( | double | _arg | ) | [virtual] |
Set the number of cartesian units between each unit along the R .
| virtual void itk::Object::SetReferenceCount | ( | int | ) | [virtual, inherited] |
Sets the reference count (use with care)
Reimplemented from itk::LightObject.
| void itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::SetTranslation | ( | const OutputVectorType & | translation | ) | [inline, inherited] |
Set translation of an MatrixOffsetTransformBase
This method sets the translation of an MatrixOffsetTransformBase. This updates Offset to reflect current translation. To define an affine transform, you must set the matrix, center, and translation OR the matrix and offset
Definition at line 259 of file itkMatrixOffsetTransformBase.h.
| void itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::SetVarCenter | ( | const InputPointType & | center | ) | [inline, protected, inherited] |
Definition at line 402 of file itkMatrixOffsetTransformBase.h.
| void itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::SetVarInverseMatrix | ( | const InverseMatrixType & | matrix | ) | const [inline, protected, inherited] |
Definition at line 382 of file itkMatrixOffsetTransformBase.h.
| void itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::SetVarMatrix | ( | const MatrixType & | matrix | ) | [inline, protected, inherited] |
Definition at line 391 of file itkMatrixOffsetTransformBase.h.
| void itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::SetVarOffset | ( | const OutputVectorType & | offset | ) | [inline, protected, inherited] |
Definition at line 399 of file itkMatrixOffsetTransformBase.h.
| void itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::SetVarTranslation | ( | const OutputVectorType & | translation | ) | [inline, protected, inherited] |
Definition at line 395 of file itkMatrixOffsetTransformBase.h.
| void itk::AffineTransform< TScalarType, NDimensions >::Shear | ( | int | axis1, | |
| int | axis2, | |||
| TScalarType | coef, | |||
| bool | pre = 0 | |||
| ) | [inherited] |
Compose affine transformation with a shear
This method composes self with a shear transformation, replacing the original contents of self. The shear is precomposed with self if pre is true, and postcomposed otherwise. The transformation is given by
y[axis1] = x[axis1] + coef*x[axis2] y[axis2] = x[axis2].
Note that the shear is applied centered at the origin.
| OutputPointType itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::TransformAzElToCartesian | ( | const InputPointType & | point | ) | const |
Perform conversion from Azimuth Elevation coordinates to Cartesian Coordinates.
| OutputPointType itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::TransformCartesianToAzEl | ( | const OutputPointType & | point | ) | const |
Perform conversion from Cartesian Coordinates to Azimuth Elevation coordinates.
| OutputCovariantVectorType itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::TransformCovariantVector | ( | const InputCovariantVectorType & | vector | ) | const [virtual, inherited] |
Reimplemented from itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >.
| OutputPointType itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::TransformPoint | ( | const InputPointType & | point | ) | const [virtual, inherited] |
Transform by an affine transformation
This method applies the affine transform given by self to a given point or vector, returning the transformed point or vector. The TransformPoint method transforms its argument as an affine point, whereas the TransformVector method transforms its argument as a vector.
Reimplemented from itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >.
| OutputPointType itk::AzimuthElevationToCartesianTransform< TScalarType, NDimensions >::TransformPoint | ( | const InputPointType & | point | ) | const |
Transform from azimuth-elevation to cartesian.
| virtual OutputVnlVectorType itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >::TransformVector | ( | const InputVnlVectorType & | ) | const [inline, virtual, inherited] |
Method to transform a vnl_vector.
Definition at line 126 of file itkTransform.h.
| OutputVnlVectorType itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::TransformVector | ( | const InputVnlVectorType & | vector | ) | const [inherited] |
| OutputVectorType itk::MatrixOffsetTransformBase< TScalarType , NInputDimensions, NOutputDimensions >::TransformVector | ( | const InputVectorType & | vector | ) | const [virtual, inherited] |
Reimplemented from itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >.
| void itk::AffineTransform< TScalarType, NDimensions >::Translate | ( | const OutputVectorType & | offset, | |
| bool | pre = 0 | |||
| ) | [inherited] |
Compose affine transformation with a translation
This method modifies self to include a translation of the origin. The translation is precomposed with self if pre is true, and postcomposed otherwise. This updates Translation based on current center.
| virtual void itk::Object::UnRegister | ( | ) | const [virtual, inherited] |
Decrease the reference count (release by another object).
Reimplemented from itk::LightObject.
ParametersType itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >::m_FixedParameters [mutable, protected, inherited] |
Definition at line 253 of file itkTransform.h.
JacobianType itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >::m_Jacobian [mutable, protected, inherited] |
Definition at line 254 of file itkTransform.h.
ParametersType itk::Transform< TScalarType, NInputDimensions, NOutputDimensions >::m_Parameters [mutable, protected, inherited] |
Definition at line 252 of file itkTransform.h.
InternalReferenceCountType itk::LightObject::m_ReferenceCount [mutable, protected, inherited] |
Number of uses of this object by other objects.
Definition at line 144 of file itkLightObject.h.
SimpleFastMutexLock itk::LightObject::m_ReferenceCountLock [mutable, protected, inherited] |
Mutex lock to protect modification to the reference count
Definition at line 147 of file itkLightObject.h.
 1.5.1 written by Dimitri van Heesch,
© 1997-2000
1.5.1 written by Dimitri van Heesch,
© 1997-2000