template<typename TInputImage, typename THessianImage, typename TOutputImage = TInputImage>
class itk::MultiScaleHessianBasedMeasureImageFilter< TInputImage, THessianImage, TOutputImage >
A filter to enhance structures using Hessian eigensystem-based measures in a multiscale framework.
The filter evaluates a Hessian-based enhancement measure, such as vesselness or objectness, at different scale levels. The Hessian-based measure is computed from the Hessian image at each scale level and the best response is selected.
Minimum and maximum sigma value can be set using SetMinSigma and SetMaxSigma methods respectively. The number of scale levels is set using SetNumberOfSigmaSteps method. Exponentially distributed scale levels are computed within the bound set by the minimum and maximum sigma values
The filter computes a second output image (accessed by the GetScalesOutput method) containing the scales at which each pixel gave the best response.
This code was contributed in the Insight Journal paper: "Generalizing vesselness with respect to dimensionality and shape" by Antiga L. https://hdl.handle.net/1926/576 http://www.insight-journal.org/browse/publication/175
- Author
- Luca Antiga Ph.D. Medical Imaging Unit, Bioengineering Department, Mario Negri Institute, Italy.
- See Also
- HessianToObjectnessMeasureImageFilter
-
Hessian3DToVesselnessMeasureImageFilter
-
HessianSmoothed3DToVesselnessMeasureImageFilter
-
HessianRecursiveGaussianImageFilter
-
SymmetricEigenAnalysisImageFilter
-
SymmetricSecondRankTensor
- Examples:
- SphinxExamples/src/Nonunit/Review/SegmentBloodVesselsWithMultiScaleHessianBasedMeasure/Code.cxx.
Definition at line 67 of file itkMultiScaleHessianBasedMeasureImageFilter.h.
|
| void | EnlargeOutputRequestedRegion (DataObject *) override |
| |
| void | GenerateData () override |
| |
| virtual DataObjectPointer | MakeOutput (DataObjectPointerArraySizeType idx) override |
| |
| | MultiScaleHessianBasedMeasureImageFilter () |
| |
| void | PrintSelf (std::ostream &os, Indent indent) const override |
| |
| | ~MultiScaleHessianBasedMeasureImageFilter () |
| |
| virtual void | CallCopyInputRegionToOutputRegion (OutputImageRegionType &destRegion, const InputImageRegionType &srcRegion) |
| |
| virtual void | CallCopyOutputRegionToInputRegion (InputImageRegionType &destRegion, const OutputImageRegionType &srcRegion) |
| |
| virtual void | GenerateInputRequestedRegion () override |
| |
| | ImageToImageFilter () |
| |
| virtual void | VerifyInputInformation () override |
| |
| | ~ImageToImageFilter () override |
| |
| void | PushBackInput (const DataObject *input) override |
| |
| void | PushFrontInput (const DataObject *input) override |
| |
| virtual void | AfterThreadedGenerateData () |
| |
| virtual void | AllocateOutputs () |
| |
| virtual void | BeforeThreadedGenerateData () |
| |
virtual const
ImageRegionSplitterBase * | GetImageRegionSplitter () const |
| |
| | ImageSource () |
| |
| virtual unsigned int | SplitRequestedRegion (unsigned int i, unsigned int pieces, OutputImageRegionType &splitRegion) |
| |
| virtual void | ThreadedGenerateData (const OutputImageRegionType &outputRegionForThread, ThreadIdType threadId) |
| |
| virtual | ~ImageSource () override |
| |
| virtual void | AddInput (DataObject *input) |
| |
| void | AddOptionalInputName (const DataObjectIdentifierType &) |
| |
| void | AddOptionalInputName (const DataObjectIdentifierType &, DataObjectPointerArraySizeType idx) |
| |
| virtual void | AddOutput (DataObject *output) |
| |
| bool | AddRequiredInputName (const DataObjectIdentifierType &) |
| |
| bool | AddRequiredInputName (const DataObjectIdentifierType &, DataObjectPointerArraySizeType idx) |
| |
| virtual void | CacheInputReleaseDataFlags () |
| |
| virtual void | GenerateOutputInformation () |
| |
| virtual void | GenerateOutputRequestedRegion (DataObject *output) |
| |
| DataObject * | GetInput (const DataObjectIdentifierType &key) |
| |
| const DataObject * | GetInput (const DataObjectIdentifierType &key) const |
| |
virtual const
DataObjectPointerArraySizeType & | GetNumberOfRequiredInputs () const |
| |
virtual const
DataObjectPointerArraySizeType & | GetNumberOfRequiredOutputs () const |
| |
| bool | IsIndexedInputName (const DataObjectIdentifierType &) const |
| |
| bool | IsIndexedOutputName (const DataObjectIdentifierType &) const |
| |
| bool | IsRequiredInputName (const DataObjectIdentifierType &) const |
| |
| | itkLegacyMacro (virtual void RemoveOutput(DataObject *output)) |
| |
| | itkLegacyMacro (void SetNumberOfOutputs(DataObjectPointerArraySizeType num)) |
| |
| | itkLegacyMacro (virtual void RemoveInput(DataObject *input)) |
| |
| | itkLegacyMacro (void SetNumberOfInputs(DataObjectPointerArraySizeType num)) |
| |
| DataObjectPointerArraySizeType | MakeIndexFromInputName (const DataObjectIdentifierType &name) const |
| |
| DataObjectPointerArraySizeType | MakeIndexFromOutputName (const DataObjectIdentifierType &name) const |
| |
| DataObjectIdentifierType | MakeNameFromInputIndex (DataObjectPointerArraySizeType idx) const |
| |
| DataObjectIdentifierType | MakeNameFromOutputIndex (DataObjectPointerArraySizeType idx) const |
| |
| | ProcessObject () |
| |
| virtual void | PropagateResetPipeline () |
| |
| virtual void | ReleaseInputs () |
| |
| virtual void | RemoveInput (const DataObjectIdentifierType &key) |
| |
| virtual void | RemoveInput (DataObjectPointerArraySizeType) |
| |
| virtual void | RemoveOutput (const DataObjectIdentifierType &key) |
| |
| virtual void | RemoveOutput (DataObjectPointerArraySizeType idx) |
| |
| bool | RemoveRequiredInputName (const DataObjectIdentifierType &) |
| |
| virtual void | RestoreInputReleaseDataFlags () |
| |
| virtual void | SetInput (const DataObjectIdentifierType &key, DataObject *input) |
| |
| virtual void | SetNthInput (DataObjectPointerArraySizeType num, DataObject *input) |
| |
| virtual void | SetNthOutput (DataObjectPointerArraySizeType num, DataObject *output) |
| |
| void | SetNumberOfIndexedInputs (DataObjectPointerArraySizeType num) |
| |
| void | SetNumberOfIndexedOutputs (DataObjectPointerArraySizeType num) |
| |
| virtual void | SetNumberOfRequiredInputs (DataObjectPointerArraySizeType) |
| |
| virtual void | SetNumberOfRequiredOutputs (DataObjectPointerArraySizeType _arg) |
| |
| virtual void | SetOutput (const DataObjectIdentifierType &key, DataObject *output) |
| |
| virtual void | SetPrimaryInput (DataObject *input) |
| |
| virtual void | SetPrimaryOutput (DataObject *output) |
| |
| void | SetRequiredInputNames (const NameArray &) |
| |
| virtual void | VerifyPreconditions () |
| |
| | ~ProcessObject () override |
| |
| DataObject * | GetInput (DataObjectPointerArraySizeType idx) |
| |
| const DataObject * | GetInput (DataObjectPointerArraySizeType idx) const |
| |
| DataObject * | GetPrimaryInput () |
| |
| const DataObject * | GetPrimaryInput () const |
| |
| virtual void | SetPrimaryInputName (const DataObjectIdentifierType &key) |
| |
| virtual const char * | GetPrimaryInputName (void) const |
| |
| DataObject * | GetOutput (const DataObjectIdentifierType &key) |
| |
| const DataObject * | GetOutput (const DataObjectIdentifierType &key) const |
| |
| virtual void | SetPrimaryOutputName (const DataObjectIdentifierType &key) |
| |
| virtual const char * | GetPrimaryOutputName (void) const |
| |
| DataObject * | GetOutput (DataObjectPointerArraySizeType idx) |
| |
| const DataObject * | GetOutput (DataObjectPointerArraySizeType idx) const |
| |
| DataObject * | GetPrimaryOutput () |
| |
| const DataObject * | GetPrimaryOutput () const |
| |
| | Object () |
| |
| bool | PrintObservers (std::ostream &os, Indent indent) const |
| |
| virtual void | SetTimeStamp (const TimeStamp &time) |
| |
| virtual | ~Object () override |
| |
| virtual LightObject::Pointer | InternalClone () const |
| |
| | LightObject () |
| |
| virtual void | PrintHeader (std::ostream &os, Indent indent) const |
| |
| virtual void | PrintTrailer (std::ostream &os, Indent indent) const |
| |
| virtual | ~LightObject () |
| |
template<typename TInputImage , typename THessianImage , typename TOutputImage = TInputImage>
Give the process object a chance to indictate that it will produce more output than it was requested to produce. For example, many imaging filters must compute the entire output at once or can only produce output in complete slices. Such filters cannot handle smaller requested regions. These filters must provide an implementation of this method, setting the output requested region to the size they will produce. By default, a process object does not modify the size of the output requested region.
Reimplemented from itk::ProcessObject.
template<typename TInputImage , typename THessianImage , typename TOutputImage = TInputImage>
Methods to turn on/off flag to inform the filter that the Hessian-based measure is non-negative (classical measures like Sato's and Frangi's are), hence it has a minimum at zero. In this case, the update buffer is initialized at zero, and the output scale and Hessian are zero in case the Hessian-based measure returns zero for all scales. Otherwise, the minimum output scale and Hessian are the ones obtained at scale SigmaMinimum. On by default.
template<typename TInputImage , typename THessianImage , typename TOutputImage = TInputImage>
Methods to turn on/off flag to inform the filter that the Hessian-based measure is non-negative (classical measures like Sato's and Frangi's are), hence it has a minimum at zero. In this case, the update buffer is initialized at zero, and the output scale and Hessian are zero in case the Hessian-based measure returns zero for all scales. Otherwise, the minimum output scale and Hessian are the ones obtained at scale SigmaMinimum. On by default.
template<typename TInputImage , typename THessianImage , typename TOutputImage = TInputImage>
Methods to turn on/off flag to inform the filter that the Hessian-based measure is non-negative (classical measures like Sato's and Frangi's are), hence it has a minimum at zero. In this case, the update buffer is initialized at zero, and the output scale and Hessian are zero in case the Hessian-based measure returns zero for all scales. Otherwise, the minimum output scale and Hessian are the ones obtained at scale SigmaMinimum. On by default.
template<typename TInputImage , typename THessianImage , typename TOutputImage = TInputImage>
Methods to turn on/off flag to inform the filter that the Hessian-based measure is non-negative (classical measures like Sato's and Frangi's are), hence it has a minimum at zero. In this case, the update buffer is initialized at zero, and the output scale and Hessian are zero in case the Hessian-based measure returns zero for all scales. Otherwise, the minimum output scale and Hessian are the ones obtained at scale SigmaMinimum. On by default.

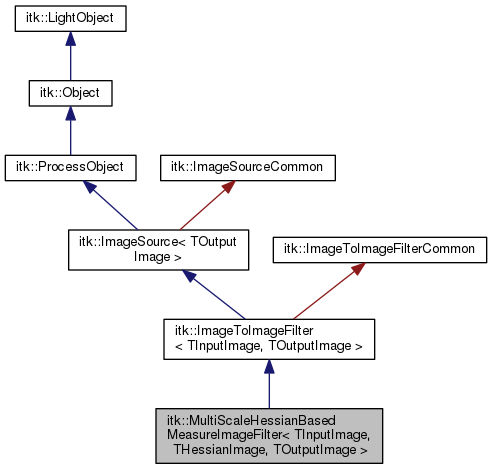
 Inheritance diagram for itk::MultiScaleHessianBasedMeasureImageFilter< TInputImage, THessianImage, TOutputImage >:
Inheritance diagram for itk::MultiScaleHessianBasedMeasureImageFilter< TInputImage, THessianImage, TOutputImage >: 1.8.5
1.8.5