|
ITK
4.4.0
Insight Segmentation and Registration Toolkit
|
|
ITK
4.4.0
Insight Segmentation and Registration Toolkit
|
#include <itkSTAPLEImageFilter.h>
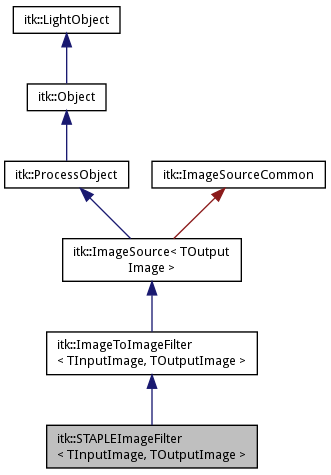
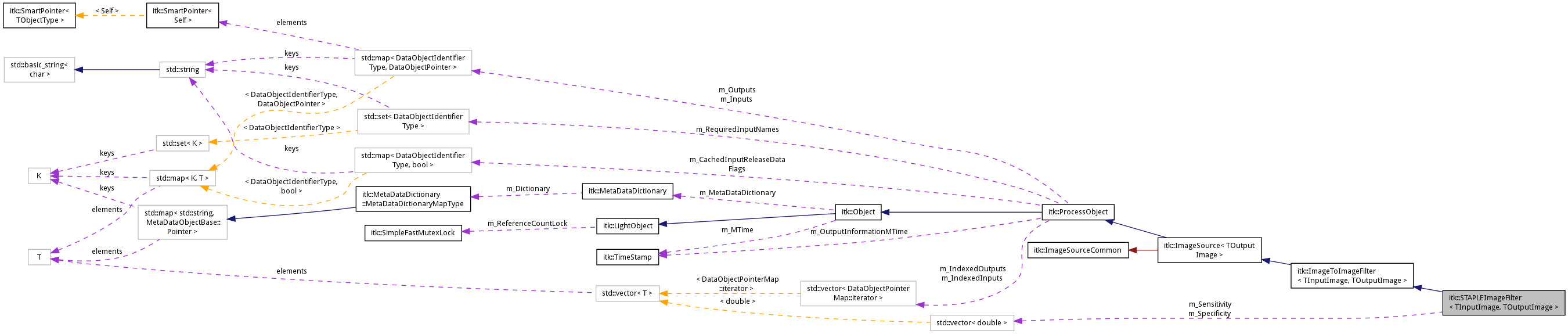
 Inheritance diagram for itk::STAPLEImageFilter< TInputImage, TOutputImage >: Collaboration diagram for itk::STAPLEImageFilter< TInputImage, TOutputImage >:
Inheritance diagram for itk::STAPLEImageFilter< TInputImage, TOutputImage >: Collaboration diagram for itk::STAPLEImageFilter< TInputImage, TOutputImage >:The STAPLE filter implements the Simultaneous Truth and Performance Level Estimation algorithm for generating ground truth volumes from a set of binary expert segmentations.
The STAPLE algorithm treats segmentation as a pixelwise classification, which leads to an averaging scheme that accounts for systematic biases in the behavior of experts in order to generate a fuzzy ground truth volume and simultaneous accuracy assessment of each expert. The ground truth volumes produced by this filter are floating point volumes of values between zero and one that indicate probability of each pixel being in the object targeted by the segmentation.
The STAPLE algorithm is described in
S. Warfield, K. Zou, W. Wells, "Validation of image segmentation and expert quality with an expectation-maximization algorithm" in MICCAI 2002: Fifth International Conference on Medical Image Computing and Computer-Assisted Intervention, Springer-Verlag, Heidelberg, Germany, 2002, pp. 298-306
Input volumes must all contain the same size RequestedRegions.
The SetConfidenceWeight parameter is a modifier for the prior probability that any pixel would be classified as inside the target object. This implementation of the STAPLE algorithm automatically calculates prior positive classification probability as the average fraction of the image volume filled by the target object in each input segmentation. The ConfidenceWeight parameter allows for scaling the of this default prior probability: if g_t is the prior probability that a pixel would be classified inside the target object, then g_t is set to g_t * ConfidenceWeight before iterating on the solution. In general ConfidenceWeight should be left to the default of 1.0.
You must provide a foreground value using SetForegroundValue that the STAPLE algorithm will use to identify positively classified pixels in the the input images. All other values in the image will be treated as background values. For example, if your input segmentations consist of 1's everywhere inside the segmented region, then use SetForegroundValue(1).
The STAPLE algorithm is an iterative E-M algorithm and will converge on a solution after some number of iterations that cannot be known a priori. After updating the filter, the total elapsed iterations taken to converge on the solution can be queried through GetElapsedIterations(). You may also specify a MaximumNumberOfIterations, after which the algorithm will stop iterating regardless of whether or not it has converged. This implementation of the STAPLE algorithm will find the solution to within seven digits of precision unless it is stopped early.
Once updated, the Sensitivity (true positive fraction, q) and Specificity (true negative fraction, q) for each expert input volume can be queried using GetSensitivity(i) and GetSpecificity(i), where i is the i-th input volume.
Definition at line 121 of file itkSTAPLEImageFilter.h.
Static Public Member Functions | |
| static Pointer | New () |
Static Public Attributes | |
| static const unsigned int | ImageDimension = TOutputImage::ImageDimension |
| Static Public Attributes inherited from itk::ImageToImageFilter< TInputImage, TOutputImage > | |
| static const unsigned int | InputImageDimension = TInputImage::ImageDimension |
| static const unsigned int | OutputImageDimension = TOutputImage::ImageDimension |
| Static Public Attributes inherited from itk::ImageSource< TOutputImage > | |
| static const unsigned int | OutputImageDimension = TOutputImage::ImageDimension |
Private Member Functions | |
| void | operator= (const Self &) |
| STAPLEImageFilter (const Self &) | |
Private Attributes | |
| double | m_ConfidenceWeight |
| unsigned int | m_ElapsedIterations |
| InputPixelType | m_ForegroundValue |
| unsigned int | m_MaximumIterations |
| std::vector< double > | m_Sensitivity |
| std::vector< double > | m_Specificity |
Additional Inherited Members | |
| Protected Types inherited from itk::ImageToImageFilter< TInputImage, TOutputImage > | |
| typedef ImageToImageFilterDetail::ImageRegionCopier < itkGetStaticConstMacro(OutputImageDimension), itkGetStaticConstMacro(InputImageDimension) > | InputToOutputRegionCopierType |
| typedef ImageToImageFilterDetail::ImageRegionCopier < itkGetStaticConstMacro(InputImageDimension), itkGetStaticConstMacro(OutputImageDimension) > | OutputToInputRegionCopierType |
| Static Protected Member Functions inherited from itk::ImageSource< TOutputImage > | |
| static const ImageRegionSplitterBase * | GetGlobalDefaultSplitter () |
| static ITK_THREAD_RETURN_TYPE | ThreaderCallback (void *arg) |
| Protected Attributes inherited from itk::ProcessObject | |
| TimeStamp | m_OutputInformationMTime |
| bool | m_Updating |
| typedef SmartPointer< const Self > itk::STAPLEImageFilter< TInputImage, TOutputImage >::ConstPointer |
Definition at line 129 of file itkSTAPLEImageFilter.h.
| typedef InputImageType::Pointer itk::STAPLEImageFilter< TInputImage, TOutputImage >::InputImagePointer |
Definition at line 150 of file itkSTAPLEImageFilter.h.
| typedef TInputImage itk::STAPLEImageFilter< TInputImage, TOutputImage >::InputImageType |
Image typedef support
Definition at line 149 of file itkSTAPLEImageFilter.h.
| typedef TInputImage::PixelType itk::STAPLEImageFilter< TInputImage, TOutputImage >::InputPixelType |
Definition at line 140 of file itkSTAPLEImageFilter.h.
| typedef OutputImageType::Pointer itk::STAPLEImageFilter< TInputImage, TOutputImage >::OutputImagePointer |
Definition at line 152 of file itkSTAPLEImageFilter.h.
| typedef Superclass::OutputImageRegionType itk::STAPLEImageFilter< TInputImage, TOutputImage >::OutputImageRegionType |
Superclass typedefs.
Definition at line 155 of file itkSTAPLEImageFilter.h.
| typedef TOutputImage itk::STAPLEImageFilter< TInputImage, TOutputImage >::OutputImageType |
Definition at line 151 of file itkSTAPLEImageFilter.h.
| typedef TOutputImage::PixelType itk::STAPLEImageFilter< TInputImage, TOutputImage >::OutputPixelType |
Extract some information from the image types. Dimensionality of the two images is assumed to be the same.
Definition at line 135 of file itkSTAPLEImageFilter.h.
| typedef SmartPointer< Self > itk::STAPLEImageFilter< TInputImage, TOutputImage >::Pointer |
Definition at line 128 of file itkSTAPLEImageFilter.h.
| typedef NumericTraits< InputPixelType >::RealType itk::STAPLEImageFilter< TInputImage, TOutputImage >::RealType |
Definition at line 141 of file itkSTAPLEImageFilter.h.
| typedef STAPLEImageFilter itk::STAPLEImageFilter< TInputImage, TOutputImage >::Self |
Standard class typedefs.
Definition at line 126 of file itkSTAPLEImageFilter.h.
| typedef ImageToImageFilter< TInputImage, TOutputImage > itk::STAPLEImageFilter< TInputImage, TOutputImage >::Superclass |
Definition at line 127 of file itkSTAPLEImageFilter.h.
|
inlineprotected |
End concept checking
Definition at line 232 of file itkSTAPLEImageFilter.h.
References itk::NumericTraits< T >::max().
|
inlineprotectedvirtual |
Definition at line 240 of file itkSTAPLEImageFilter.h.
|
private |
|
virtual |
Create an object from an instance, potentially deferring to a factory. This method allows you to create an instance of an object that is exactly the same type as the referring object. This is useful in cases where an object has been cast back to a base class.
Reimplemented from itk::Object.
|
protectedvirtual |
A version of GenerateData() specific for image processing filters. This implementation will split the processing across multiple threads. The buffer is allocated by this method. Then the BeforeThreadedGenerateData() method is called (if provided). Then, a series of threads are spawned each calling ThreadedGenerateData(). After all the threads have completed processing, the AfterThreadedGenerateData() method is called (if provided). If an image processing filter cannot be threaded, the filter should provide an implementation of GenerateData(). That implementation is responsible for allocating the output buffer. If a filter an be threaded, it should NOT provide a GenerateData() method but should provide a ThreadedGenerateData() instead.
Reimplemented from itk::ImageSource< TOutputImage >.
|
virtual |
Scales the estimated prior probability that a pixel will be inside the targeted object of segmentation. The default prior probability g_t is calculated automatically as the average fraction of positively classified pixels to the total size of the volume (across all input volumes). ConfidenceWeight will scale this default value as g_t = g_t * ConfidenceWeight. In general, ConfidenceWeight should be left to the default of 1.0.
|
virtual |
Get the number of elapsed iterations of the iterative E-M algorithm.
|
virtual |
Set get the binary ON value of the input image.
|
virtual |
Set/Get the maximum number of iterations after which the STAPLE algorithm will be considered to have converged. In general this SHOULD NOT be set and the algorithm should be allowed to converge on its own.
|
virtual |
Run-time type information (and related methods)
Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >.
|
inline |
After the filter is updated, this method returns a std::vector<double> of all Sensitivity (true positive fraction, p) values for the expert input volumes.
Definition at line 173 of file itkSTAPLEImageFilter.h.
|
inline |
After the filter is updated, this method returns the Sensitivity (true positive fraction, p) value for the i-th expert input volume.
Definition at line 180 of file itkSTAPLEImageFilter.h.
|
inline |
After the filter is updated, this method returns a std::vector<double> of all Specificity (true negative fraction, q) values for the expert input volumes.
Definition at line 165 of file itkSTAPLEImageFilter.h.
|
inline |
After the filter is updated, this method returns the Specificity (true negative fraction, q) value for the i-th expert input volume.
Definition at line 192 of file itkSTAPLEImageFilter.h.
|
static |
Method for creation through the object factory.
|
private |
|
protectedvirtual |
Methods invoked by Print() to print information about the object including superclasses. Typically not called by the user (use Print() instead) but used in the hierarchical print process to combine the output of several classes.
Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >.
|
virtual |
Scales the estimated prior probability that a pixel will be inside the targeted object of segmentation. The default prior probability g_t is calculated automatically as the average fraction of positively classified pixels to the total size of the volume (across all input volumes). ConfidenceWeight will scale this default value as g_t = g_t * ConfidenceWeight. In general, ConfidenceWeight should be left to the default of 1.0.
|
virtual |
Set get the binary ON value of the input image.
|
virtual |
Set/Get the maximum number of iterations after which the STAPLE algorithm will be considered to have converged. In general this SHOULD NOT be set and the algorithm should be allowed to converge on its own.
| itk::STAPLEImageFilter< TInputImage, TOutputImage >::typedef | ( | Concept::HasNumericTraits< InputPixelType > | ) |
Begin concept checking This class requires InputHasNumericTraitsCheck in the form of ( Concept::HasNumericTraits< InputPixelType > )
|
static |
Extract some information from the image types. Dimensionality of the two images is assumed to be the same.
Definition at line 146 of file itkSTAPLEImageFilter.h.
|
private |
Definition at line 253 of file itkSTAPLEImageFilter.h.
|
private |
Definition at line 250 of file itkSTAPLEImageFilter.h.
|
private |
Definition at line 249 of file itkSTAPLEImageFilter.h.
|
private |
Definition at line 251 of file itkSTAPLEImageFilter.h.
|
private |
Definition at line 255 of file itkSTAPLEImageFilter.h.
|
private |
Definition at line 256 of file itkSTAPLEImageFilter.h.
 1.8.3.1
1.8.3.1