|
ITK
5.2.0
Insight Toolkit
|
|
ITK
5.2.0
Insight Toolkit
|
#include <itkSignedDanielssonDistanceMapImageFilter.h>
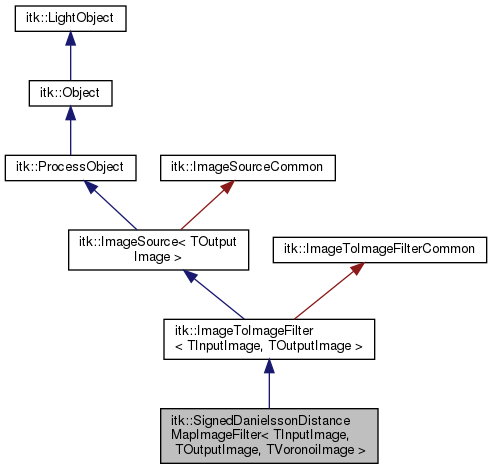
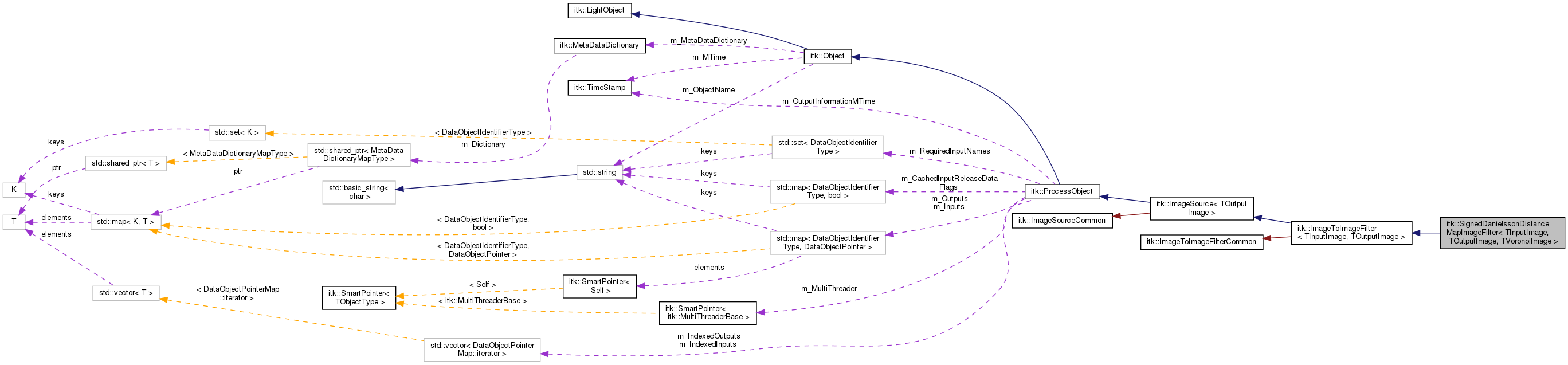
 Inheritance diagram for itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >: Collaboration diagram for itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >:
Inheritance diagram for itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >: Collaboration diagram for itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >:Static Public Member Functions | |
| static Pointer | New () |
| Static Public Member Functions inherited from itk::ImageToImageFilter< TInputImage, TOutputImage > | |
| static void | SetGlobalDefaultDirectionTolerance (double) |
| static double | GetGlobalDefaultDirectionTolerance () |
| static void | SetGlobalDefaultCoordinateTolerance (double) |
| static double | GetGlobalDefaultCoordinateTolerance () |
| Static Public Member Functions inherited from itk::Object | |
| static bool | GetGlobalWarningDisplay () |
| static void | GlobalWarningDisplayOff () |
| static void | GlobalWarningDisplayOn () |
| static Pointer | New () |
| static void | SetGlobalWarningDisplay (bool val) |
| Static Public Member Functions inherited from itk::LightObject | |
| static void | BreakOnError () |
| static Pointer | New () |
Static Public Attributes | |
| static constexpr unsigned int | InputImageDimension = InputImageType::ImageDimension |
| Static Public Attributes inherited from itk::ImageToImageFilter< TInputImage, TOutputImage > | |
| static constexpr unsigned int | InputImageDimension = TInputImage::ImageDimension |
| static constexpr unsigned int | OutputImageDimension = TOutputImage::ImageDimension |
| Static Public Attributes inherited from itk::ImageSource< TOutputImage > | |
| static constexpr unsigned int | OutputImageDimension = TOutputImage::ImageDimension |
Private Attributes | |
| bool | m_InsideIsPositive |
| bool | m_SquaredDistance |
| bool | m_UseImageSpacing |
This filter computes the signed distance map of the input image as an approximation with pixel accuracy to the Euclidean distance.
This class is parameterized over the type of the input image and the type of the output image.
For purposes of evaluating the signed distance map, the input is assumed to be binary composed of pixels with value 0 and non-zero.
The inside is considered as having negative distances. Outside is treated as having positive distances. To change the convention, use the InsideIsPositive(bool) function.
As a convention, the distance is evaluated from the boundary of the ON pixels.
The filter returns
This filter internally uses the DanielssonDistanceMap filter. This filter is N-dimensional.
Definition at line 94 of file itkSignedDanielssonDistanceMapImageFilter.h.
| using itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::ConstPointer = SmartPointer<const Self> |
Definition at line 103 of file itkSignedDanielssonDistanceMapImageFilter.h.
| using itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::DataObjectPointer = typename Superclass::DataObjectPointer |
Pointer Type for data object
Definition at line 153 of file itkSignedDanielssonDistanceMapImageFilter.h.
| using itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::DataObjectPointerArraySizeType = ProcessObject::DataObjectPointerArraySizeType |
This is overloaded to create the VectorDistanceMap output image
Definition at line 210 of file itkSignedDanielssonDistanceMapImageFilter.h.
| using itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::IndexType = typename RegionType::IndexType |
Type for the index of the input image.
Definition at line 122 of file itkSignedDanielssonDistanceMapImageFilter.h.
| using itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::InputImagePointer = typename InputImageType::ConstPointer |
Pointer Type for input image.
Definition at line 140 of file itkSignedDanielssonDistanceMapImageFilter.h.
| using itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::InputImageType = TInputImage |
Type for input image.
Definition at line 112 of file itkSignedDanielssonDistanceMapImageFilter.h.
| using itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::OffsetType = typename InputImageType::OffsetType |
Type for the index of the input image.
Definition at line 125 of file itkSignedDanielssonDistanceMapImageFilter.h.
| using itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::OutputImagePointer = typename OutputImageType::Pointer |
Pointer Type for the output image.
Definition at line 143 of file itkSignedDanielssonDistanceMapImageFilter.h.
| using itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::OutputImageType = TOutputImage |
Type for two of the three output images: the VoronoiMap and the DistanceMap.
Definition at line 116 of file itkSignedDanielssonDistanceMapImageFilter.h.
| using itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::PixelType = typename InputImageType::PixelType |
Type for the pixel type of the input image.
Definition at line 128 of file itkSignedDanielssonDistanceMapImageFilter.h.
| using itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::Pointer = SmartPointer<Self> |
Definition at line 102 of file itkSignedDanielssonDistanceMapImageFilter.h.
| using itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::RegionType = typename InputImageType::RegionType |
Type for the region of the input image.
Definition at line 119 of file itkSignedDanielssonDistanceMapImageFilter.h.
| using itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::Self = SignedDanielssonDistanceMapImageFilter |
Standard class type aliases.
Definition at line 100 of file itkSignedDanielssonDistanceMapImageFilter.h.
| using itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::SizeType = typename RegionType::SizeType |
Type for the size of the input image.
Definition at line 131 of file itkSignedDanielssonDistanceMapImageFilter.h.
| using itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::Superclass = ImageToImageFilter<TInputImage, TOutputImage> |
Definition at line 101 of file itkSignedDanielssonDistanceMapImageFilter.h.
| using itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::VectorImagePointer = typename VectorImageType::Pointer |
Pointer Type for the vector distance image.
Definition at line 146 of file itkSignedDanielssonDistanceMapImageFilter.h.
| using itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::VectorImageType = Image<OffsetType, Self::InputImageDimension> |
Pointer Type for the vector distance image
Definition at line 137 of file itkSignedDanielssonDistanceMapImageFilter.h.
| using itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::VoronoiImagePointer = typename VoronoiImageType::Pointer |
Definition at line 149 of file itkSignedDanielssonDistanceMapImageFilter.h.
| using itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::VoronoiImageType = TVoronoiImage |
Definition at line 148 of file itkSignedDanielssonDistanceMapImageFilter.h.
| using itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::VoronoiPixelType = typename VoronoiImageType::PixelType |
Definition at line 150 of file itkSignedDanielssonDistanceMapImageFilter.h.
|
protected |
|
overrideprotecteddefault |
|
virtual |
Create an object from an instance, potentially deferring to a factory. This method allows you to create an instance of an object that is exactly the same type as the referring object. This is useful in cases where an object has been cast back to a base class.
Reimplemented from itk::Object.
|
overrideprotectedvirtual |
Compute Danielsson distance map and Voronoi Map.
Reimplemented from itk::ImageSource< TOutputImage >.
| OutputImageType* itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::GetDistanceMap | ( | ) |
Get Distance map image. The distance map is shown as a gray value image depending on the pixel type of the output image. Regarding the source image, background should be dark (gray value = 0) and object should have a gray value larger than 0. The minimal distance is calculated on the object frontier, and the output image gives for each pixel its minimal distance from the object (if there is more than one object the closest object is considered).
|
virtual |
Get if the inside represents positive values in the signed distance map. See GetInsideIsPositive()
|
virtual |
Run-time type information (and related methods).
Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >.
|
virtual |
Get the distance squared.
|
virtual |
Get whether spacing is used.
| VectorImageType* itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::GetVectorDistanceMap | ( | ) |
Get vector field of distances.
| VoronoiImageType* itk::SignedDanielssonDistanceMapImageFilter< TInputImage, TOutputImage, TVoronoiImage >::GetVoronoiMap | ( | ) |
Get Voronoi Map This map shows for each pixel what object is closest to it. Each object should be labeled by a number (larger than 0), so the map has a value for each pixel corresponding to the label of the closest object.
|
virtual |
|
virtual |
Set if the inside represents positive values in the signed distance map. By convention ON pixels are treated as inside pixels. Default is true.
| virtual DataObjectPointer itk::ProcessObject::MakeOutput |
Make a DataObject of the correct type to used as the specified output.
Every ProcessObject subclass must be able to create a DataObject that can be used as a specified output. This method is automatically called when DataObject::DisconnectPipeline() is called. DataObject::DisconnectPipeline, disconnects a data object from being an output of its current source. When the data object is disconnected, the ProcessObject needs to construct a replacement output data object so that the ProcessObject is in a valid state. So DataObject::DisconnectPipeline eventually calls ProcessObject::MakeOutput. Note that MakeOutput always returns a itkSmartPointer to a DataObject. ImageSource and MeshSource override this method to create the correct type of image and mesh respectively. If a filter has multiple outputs of different types, then that filter must provide an implementation of MakeOutput().
| virtual DataObjectPointer itk::ProcessObject::MakeOutput |
Make a DataObject of the correct type to used as the specified output.
Every ProcessObject subclass must be able to create a DataObject that can be used as a specified output. This method is automatically called when DataObject::DisconnectPipeline() is called. DataObject::DisconnectPipeline, disconnects a data object from being an output of its current source. When the data object is disconnected, the ProcessObject needs to construct a replacement output data object so that the ProcessObject is in a valid state. So DataObject::DisconnectPipeline eventually calls ProcessObject::MakeOutput. Note that MakeOutput always returns a itkSmartPointer to a DataObject. ImageSource and MeshSource override this method to create the correct type of image and mesh respectively. If a filter has multiple outputs of different types, then that filter must provide an implementation of MakeOutput().
|
overridevirtual |
Make a DataObject of the correct type to used as the specified output. Every ProcessObject subclass must be able to create a DataObject that can be used as a specified output. This method is automatically called when DataObject::DisconnectPipeline() is called. DataObject::DisconnectPipeline, disconnects a data object from being an output of its current source. When the data object is disconnected, the ProcessObject needs to construct a replacement output data object so that the ProcessObject is in a valid state. So DataObject::DisconnectPipeline eventually calls ProcessObject::MakeOutput. Note that MakeOutput always returns a SmartPointer to a DataObject. If a subclass of ImageSource has multiple outputs of different types, then that class must provide an implementation of MakeOutput().
Reimplemented from itk::ImageSource< TOutputImage >.
|
static |
Method for creation through the object factory
|
overrideprotectedvirtual |
Typedef for the region copier function object that converts an input region to an output region.
Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >.
|
virtual |
Set if the inside represents positive values in the signed distance map. By convention ON pixels are treated as inside pixels.
|
virtual |
Set if the distance should be squared.
|
virtual |
Set if image spacing should be used in computing distances.
|
virtual |
|
virtual |
Set On/Off if the distance is squared.
|
virtual |
|
virtual |
Set On/Off whether spacing is used.
|
staticconstexpr |
The dimension of the input image.
Definition at line 134 of file itkSignedDanielssonDistanceMapImageFilter.h.
|
private |
Definition at line 237 of file itkSignedDanielssonDistanceMapImageFilter.h.
|
private |
Definition at line 235 of file itkSignedDanielssonDistanceMapImageFilter.h.
|
private |
Definition at line 236 of file itkSignedDanielssonDistanceMapImageFilter.h.
 1.8.16
1.8.16