#include <itkRigid3DPerspectiveTransform.h>
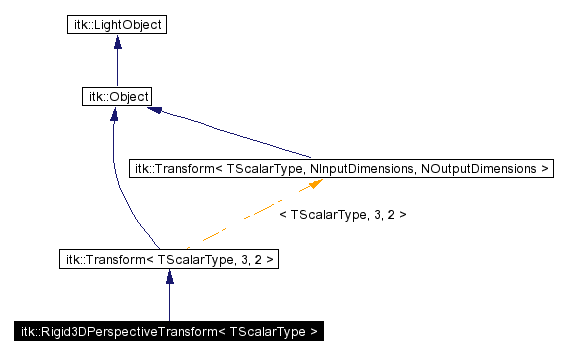
Inheritance diagram for itk::Rigid3DPerspectiveTransform:
Public Types | |
| typedef SmartPointer< Self > | Pointer |
| typedef SmartPointer< const Self > | ConstPointer |
| typedef Superclass::ScalarType | ScalarType |
| typedef Superclass::ParametersType | ParametersType |
| typedef Superclass::JacobianType | JacobianType |
| typedef Matrix< TScalarType, itkGetStaticConstMacro(InputSpaceDimension), itkGetStaticConstMacro(InputSpaceDimension) | MatrixType ) |
| typedef Vector< TScalarType, itkGetStaticConstMacro(InputSpaceDimension) | OffsetType ) |
| typedef vnl_quaternion< TScalarType > | VnlQuaternionType |
| typedef Versor< TScalarType > | VersorType |
| typedef VersorType::VectorType | AxisType |
| typedef VersorType::ValueType | AngleType |
| typedef Rigid3DPerspectiveTransform | Self |
| typedef Transform< TScalarType, itkGetStaticConstMacro(InputSpaceDimension), itkGetStaticConstMacro(OutputSpaceDimension) | Superclass ) |
| typedef Vector< TScalarType, itkGetStaticConstMacro(InputSpaceDimension) | InputVectorType ) |
| typedef Vector< TScalarType, itkGetStaticConstMacro(OutputSpaceDimension) | OutputVectorType ) |
| typedef Point< TScalarType, itkGetStaticConstMacro(InputSpaceDimension) | InputPointType ) |
| typedef Point< TScalarType, itkGetStaticConstMacro(OutputSpaceDimension) | OutputPointType ) |
Public Methods | |
| virtual const char * | GetClassName () const |
| const OffsetType & | GetOffset () const |
| const VersorType & | GetRotation () const |
| void | SetParameters (const ParametersType ¶meters) |
| void | SetOffset (const OffsetType &offset) |
| void | SetRotation (const VersorType &rotation) |
| void | SetRotation (const Vector< TScalarType, 3 > &axis, double angle) |
| void | SetFocalDistance (TScalarType focalDistance) |
| void | SetHeight (TScalarType height) |
| void | SetWidth (TScalarType width) |
| OutputPointType | TransformPoint (const InputPointType &point) const |
| void | ComputeMatrix (void) |
| virtual const JacobianType & | GetJacobian (const InputPointType &point) const |
| itkStaticConstMacro (InputSpaceDimension, unsigned int, 3) | |
| itkStaticConstMacro (OutputSpaceDimension, unsigned int, 2) | |
| itkStaticConstMacro (SpaceDimension, unsigned int, 3) | |
| itkStaticConstMacro (ParametersDimension, unsigned int, 6) | |
Static Public Methods | |
| Pointer | New () |
Protected Methods | |
| Rigid3DPerspectiveTransform () | |
| ~Rigid3DPerspectiveTransform () | |
| void | PrintSelf (std::ostream &os, Indent indent) const |
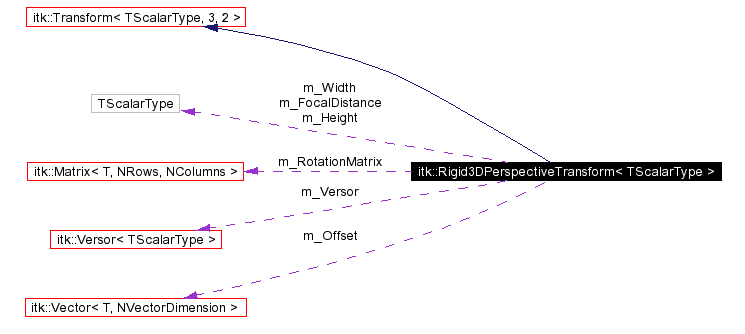
This transform applies a rotation and translation to the 3D space followed by a projection to 2D space along the Z axis.
Definition at line 41 of file itkRigid3DPerspectiveTransform.h.
|
|||||
|
Definition at line 102 of file itkRigid3DPerspectiveTransform.h. |
|
|||||
|
Definition at line 101 of file itkRigid3DPerspectiveTransform.h. |
|
|||||
|
Reimplemented from itk::Transform< TScalarType, 3, 2 >. Definition at line 63 of file itkRigid3DPerspectiveTransform.h. |
|
|||||
|
Standard coordinate point type for this class. Reimplemented from itk::Transform< TScalarType, 3, 2 >. Definition at line 92 of file itkRigid3DPerspectiveTransform.h. |
|
|||||
|
Standard vector type for this class. Reimplemented from itk::Transform< TScalarType, 3, 2 >. Definition at line 87 of file itkRigid3DPerspectiveTransform.h. |
|
|||||
|
Jacobian type. Reimplemented from itk::Transform< TScalarType, 3, 2 >. Definition at line 78 of file itkRigid3DPerspectiveTransform.h. |
|
|||||
|
Standard matrix type for this class. Definition at line 81 of file itkRigid3DPerspectiveTransform.h. |
|
|||||
|
Standard vector type for this class. Definition at line 84 of file itkRigid3DPerspectiveTransform.h. |
|
|||||
|
Standard coordinate point type for this class. Reimplemented from itk::Transform< TScalarType, 3, 2 >. Definition at line 93 of file itkRigid3DPerspectiveTransform.h. |
|
|||||
|
Standard vector type for this class. Reimplemented from itk::Transform< TScalarType, 3, 2 >. Definition at line 88 of file itkRigid3DPerspectiveTransform.h. |
|
|||||
|
Parameters type. Reimplemented from itk::Transform< TScalarType, 3, 2 >. Definition at line 75 of file itkRigid3DPerspectiveTransform.h. |
|
|||||
|
Reimplemented from itk::Transform< TScalarType, 3, 2 >. Definition at line 62 of file itkRigid3DPerspectiveTransform.h. |
|
|||||
|
Scalar type. Reimplemented from itk::Transform< TScalarType, 3, 2 >. Definition at line 72 of file itkRigid3DPerspectiveTransform.h. |
|
|||||
|
Standard class typedefs. Reimplemented from itk::Transform< TScalarType, 3, 2 >. Definition at line 56 of file itkRigid3DPerspectiveTransform.h. |
|
|||||
|
Standard class typedefs. Reimplemented from itk::Transform< TScalarType, 3, 2 >. Definition at line 59 of file itkRigid3DPerspectiveTransform.h. |
|
|||||
|
Versor type. Definition at line 100 of file itkRigid3DPerspectiveTransform.h. |
|
|||||
|
Standard vnl_quaternion type. Definition at line 97 of file itkRigid3DPerspectiveTransform.h. |
|
|||||||||
|
|
|
|||||||||
|
|
|
||||||||||
|
Compute the matrix. |
|
|||||||||
|
Run-time type information (and related methods). Reimplemented from itk::Transform< TScalarType, 3, 2 >. |
|
||||||||||
|
Compute the Jacobian Matrix of the transformation at one point Reimplemented from itk::Transform< TScalarType, 3, 2 >. |
|
||||||||||
|
Get offset of an Rigid3DPerspectiveTransform This method returns the value of the offset of the Rigid3DPerspectiveTransform. Definition at line 107 of file itkRigid3DPerspectiveTransform.h. |
|
|||||||||
|
Get rotation from an Rigid3DPerspectiveTransform. This method returns the value of the rotation of the Rigid3DPerspectiveTransform. Definition at line 113 of file itkRigid3DPerspectiveTransform.h. |
|
||||||||||||||||||||
|
Dimension of parameters. |
|
||||||||||||||||||||
|
Dimension of parameters. |
|
||||||||||||||||||||
|
Dimension of the domain space. |
|
||||||||||||||||||||
|
Dimension of the domain space. |
|
|||||||||
|
New macro for creation of through a Smart Pointer. Reimplemented from itk::Transform< TScalarType, 3, 2 >. |
|
||||||||||||||||
|
Methods invoked by Print() to print information about the object including superclasses. Typically not called by the user (use Print() instead) but used in the hierarchical print process to combine the output of several classes. Reimplemented from itk::Object. |
|
||||||||||
|
Set the Focal Distance of the projection This method sets the focal distance for the perspective projection to a value specified by the user. Definition at line 140 of file itkRigid3DPerspectiveTransform.h. |
|
||||||||||
|
Set the Height of the output plan This method sets the height of the output plan to a value specified by the user. This value is used to scale and center the points at the output. Definition at line 148 of file itkRigid3DPerspectiveTransform.h. |
|
||||||||||
|
This method sets the offset of an Rigid3DPerspectiveTransform to a value specified by the user. Definition at line 124 of file itkRigid3DPerspectiveTransform.h. |
|
||||||||||
|
Set the transformation from a container of parameters. This is typically used by optimizers. There are 6 parameters. The first three represent the versor and the last three represents the offset. Reimplemented from itk::Transform< TScalarType, 3, 2 >. |
|
||||||||||||||||
|
Set Rotation of the Rigid transform. This method sets the rotation of an Rigid3DTransform to a value specified by the user using the axis of rotation an the angle. |
|
||||||||||
|
This method sets the rotation of an Rigid3DPerspectiveTransform to a value specified by the user. |
|
||||||||||
|
Set the Width of the output plan This method sets the width of the output plan to a value specified by the user. This value is used to scale and center the points at the output. Definition at line 156 of file itkRigid3DPerspectiveTransform.h. |
|
||||||||||
|
Transform by a Rigid3DPerspectiveTransform. This method applies the transform given by self to a given point, returning the transformed point. Reimplemented from itk::Transform< TScalarType, 3, 2 >. |
 1.2.15 written by Dimitri van Heesch,
© 1997-2000
1.2.15 written by Dimitri van Heesch,
© 1997-2000