#include <itkRigid3DTransform.h>
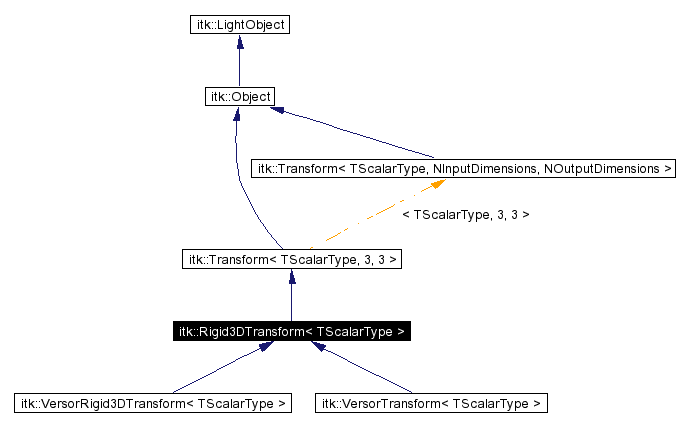
Inheritance diagram for itk::Rigid3DTransform:
Public Types | |
| typedef Rigid3DTransform | Self |
| typedef Transform< TScalarType, 3, 3 > | Superclass |
| typedef SmartPointer< Self > | Pointer |
| typedef SmartPointer< const Self > | ConstPointer |
| typedef Superclass::ScalarType | ScalarType |
| typedef Superclass::ParametersType | ParametersType |
| typedef Superclass::JacobianType | JacobianType |
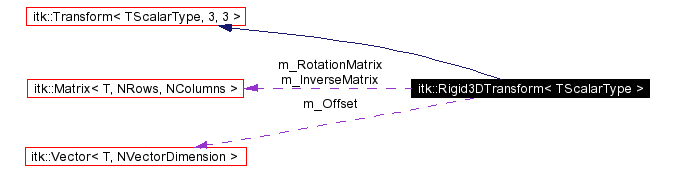
| typedef Matrix< ScalarType, itkGetStaticConstMacro(InputSpaceDimension), itkGetStaticConstMacro(InputSpaceDimension) | MatrixType ) |
| typedef Vector< TScalarType, itkGetStaticConstMacro(InputSpaceDimension) | OffsetType ) |
| typedef Vector< TScalarType, itkGetStaticConstMacro(InputSpaceDimension) | InputVectorType ) |
| typedef Vector< TScalarType, itkGetStaticConstMacro(OutputSpaceDimension) | OutputVectorType ) |
| typedef CovariantVector< TScalarType, itkGetStaticConstMacro(InputSpaceDimension) | InputCovariantVectorType ) |
| typedef CovariantVector< TScalarType, itkGetStaticConstMacro(OutputSpaceDimension) | OutputCovariantVectorType ) |
| typedef vnl_vector_fixed< TScalarType, itkGetStaticConstMacro(InputSpaceDimension) | InputVnlVectorType ) |
| typedef vnl_vector_fixed< TScalarType, itkGetStaticConstMacro(OutputSpaceDimension) | OutputVnlVectorType ) |
| typedef Point< TScalarType, itkGetStaticConstMacro(InputSpaceDimension) | InputPointType ) |
| typedef Point< TScalarType, itkGetStaticConstMacro(OutputSpaceDimension) | OutputPointType ) |
| typedef vnl_quaternion< TScalarType > | VnlQuaternionType |
| typedef Versor< TScalarType > | VersorType |
Public Methods | |
| virtual const char * | GetClassName () const |
| virtual OffsetType | GetOffset () const |
| virtual MatrixType | GetRotationMatrix () const |
| virtual void | SetOffset (OffsetType _arg) |
| void | SetRotationMatrix (const MatrixType &matrix) |
| void | Compose (const Self *other, bool pre=false) |
| void | Translate (const OffsetType &offset, bool pre=false) |
| OutputCovariantVectorType | TransformCovariantVector (const InputCovariantVectorType &vector) const |
| InputCovariantVectorType | BackTransform (const OutputCovariantVectorType &vector) const |
| void | PrintSelf (std::ostream &os, Indent indent) const |
| Pointer | Inverse (void) const |
| void | SetIdentity (void) |
| virtual const JacobianType & | GetJacobian (const InputPointType &point) const |
| itkStaticConstMacro (InputSpaceDimension, unsigned int, 3) | |
| itkStaticConstMacro (OutputSpaceDimension, unsigned int, 3) | |
| itkStaticConstMacro (ParametersDimension, unsigned int, 6) | |
| OutputPointType | TransformPoint (const InputPointType &point) const |
| OutputVectorType | TransformVector (const InputVectorType &vector) const |
| OutputVnlVectorType | TransformVector (const InputVnlVectorType &vector) const |
| InputPointType | BackTransform (const OutputPointType &point) const |
| InputVectorType | BackTransform (const OutputVectorType &vector) const |
| InputVnlVectorType | BackTransform (const OutputVnlVectorType &vector) const |
Static Public Methods | |
| Pointer | New () |
Protected Methods | |
| Rigid3DTransform () | |
| ~Rigid3DTransform () | |
Protected Attributes | |
| MatrixType | m_RotationMatrix |
| MatrixType | m_InverseMatrix |
This transform applies a rotation and translation to the space
Definition at line 37 of file itkRigid3DTransform.h.
|
|||||
|
Reimplemented from itk::Transform< TScalarType, 3, 3 >. Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 45 of file itkRigid3DTransform.h. |
|
|||||
|
Standard covariant vector type for this class.
Reimplemented from itk::Transform< TScalarType, 3, 3 >. Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 79 of file itkRigid3DTransform.h. |
|
|||||
|
Standard coordinate point type for this class.
Reimplemented from itk::Transform< TScalarType, 3, 3 >. Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 87 of file itkRigid3DTransform.h. |
|
|||||
|
Standard vector type for this class.
Reimplemented from itk::Transform< TScalarType, 3, 3 >. Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 75 of file itkRigid3DTransform.h. |
|
|||||
|
Standard vnl_vector type for this class.
Reimplemented from itk::Transform< TScalarType, 3, 3 >. Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 83 of file itkRigid3DTransform.h. |
|
|||||
|
Jacobian type. Reimplemented from itk::Transform< TScalarType, 3, 3 >. Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 66 of file itkRigid3DTransform.h. |
|
|||||
|
Standard matrix type for this class.
Definition at line 69 of file itkRigid3DTransform.h. |
|
|||||
|
Standard vector type for this class.
Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 72 of file itkRigid3DTransform.h. |
|
|||||
|
Reimplemented from itk::Transform< TScalarType, 3, 3 >. Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 80 of file itkRigid3DTransform.h. |
|
|||||
|
Reimplemented from itk::Transform< TScalarType, 3, 3 >. Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 88 of file itkRigid3DTransform.h. |
|
|||||
|
Reimplemented from itk::Transform< TScalarType, 3, 3 >. Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 76 of file itkRigid3DTransform.h. |
|
|||||
|
Reimplemented from itk::Transform< TScalarType, 3, 3 >. Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 84 of file itkRigid3DTransform.h. |
|
|||||
|
Parameters type. Reimplemented from itk::Transform< TScalarType, 3, 3 >. Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 63 of file itkRigid3DTransform.h. |
|
|||||
|
Reimplemented from itk::Transform< TScalarType, 3, 3 >. Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 44 of file itkRigid3DTransform.h. |
|
|||||
|
Scalar type. Reimplemented from itk::Transform< TScalarType, 3, 3 >. Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 60 of file itkRigid3DTransform.h. |
|
|||||
|
Standard class typedefs. Reimplemented from itk::Transform< TScalarType, 3, 3 >. Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 42 of file itkRigid3DTransform.h. |
|
|||||
|
Reimplemented from itk::Transform< TScalarType, 3, 3 >. Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 43 of file itkRigid3DTransform.h. |
|
|||||
|
Standard Versor type.
Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 94 of file itkRigid3DTransform.h. |
|
|||||
|
Standard vnl_quaternion type.
Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 91 of file itkRigid3DTransform.h. |
|
|||||||||
|
|
|
|||||||||
|
|
|
||||||||||
|
|
|
||||||||||
|
Back transform by an affine transformation This method finds the point or vector that maps to a given point or vector under the affine transformation defined by self. If no such point exists, an exception is thrown. |
|
||||||||||
|
Back transform by an affine transformation This method finds the point or vector that maps to a given point or vector under the affine transformation defined by self. If no such point exists, an exception is thrown. |
|
||||||||||
|
Back transform by an affine transformation This method finds the point or vector that maps to a given point or vector under the affine transformation defined by self. If no such point exists, an exception is thrown. |
|
||||||||||||||||
|
Compose with another Rigid3DTransform |
|
|||||||||
|
Run-time type information (and related methods). Reimplemented from itk::Transform< TScalarType, 3, 3 >. Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. |
|
||||||||||
|
Compute the Jacobian Matrix of the transformation at one point Reimplemented from itk::Transform< TScalarType, 3, 3 >. Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. |
|
|||||||||
|
Get offset of an Rigid3DTransform This method returns the value of the offset of the Rigid3DTransform. |
|
|||||||||
|
Get rotation MAtrix from an Rigid3DTransform This method returns the value of the rotation of the Rigid3DTransform. |
|
||||||||||
|
Find inverse of an affine transformation This method creates and returns a new Rigid3DTransform object which is the inverse of self. If self is not invertible, an exception is thrown. |
|
||||||||||||||||||||
|
Dimension of the space. Reimplemented in itk::VersorRigid3DTransform< TScalarType >. |
|
||||||||||||||||||||
|
Dimension of the space. |
|
||||||||||||||||||||
|
Dimension of the space. |
|
|||||||||
|
New macro for creation of through a Smart Pointer Reimplemented from itk::Transform< TScalarType, 3, 3 >. Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. |
|
||||||||||||||||
|
Print contents of an Rigid3DTransform Reimplemented from itk::Object. Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. |
|
||||||||||
|
Set the parameters to the IdentityTransform |
|
||||||||||
|
Set offset of a Rigid3D Transform This method sets the offset of an Rigid3DTransform to a value specified by the user. |
|
||||||||||
|
Set the rotation Matrix of a Rigid3D Transform This method sets the 3x3 matrix representing a rotation in the transform. The Matrix is expected to be orthogonal with a certain tolerance.
|
|
||||||||||
|
Reimplemented from itk::Transform< TScalarType, 3, 3 >. |
|
||||||||||
|
Transform by an affine transformation This method applies the affine transform given by self to a given point or vector, returning the transformed point or vector. Reimplemented from itk::Transform< TScalarType, 3, 3 >. |
|
||||||||||
|
Transform by an affine transformation This method applies the affine transform given by self to a given point or vector, returning the transformed point or vector. Reimplemented from itk::Transform< TScalarType, 3, 3 >. |
|
||||||||||
|
Transform by an affine transformation This method applies the affine transform given by self to a given point or vector, returning the transformed point or vector. Reimplemented from itk::Transform< TScalarType, 3, 3 >. |
|
||||||||||||||||
|
Compose the transformation with a translation This method modifies self to include a translation of the origin. The translation is precomposed with self if pre is true, and postcomposed otherwise. |
|
|||||
|
Definition at line 213 of file itkRigid3DTransform.h. |
|
|||||
|
Definition at line 210 of file itkRigid3DTransform.h. |
 1.2.15 written by Dimitri van Heesch,
© 1997-2000
1.2.15 written by Dimitri van Heesch,
© 1997-2000