|
ITK
4.6.0
Insight Segmentation and Registration Toolkit
|
|
ITK
4.6.0
Insight Segmentation and Registration Toolkit
|
#include <itkRigid3DPerspectiveTransform.h>
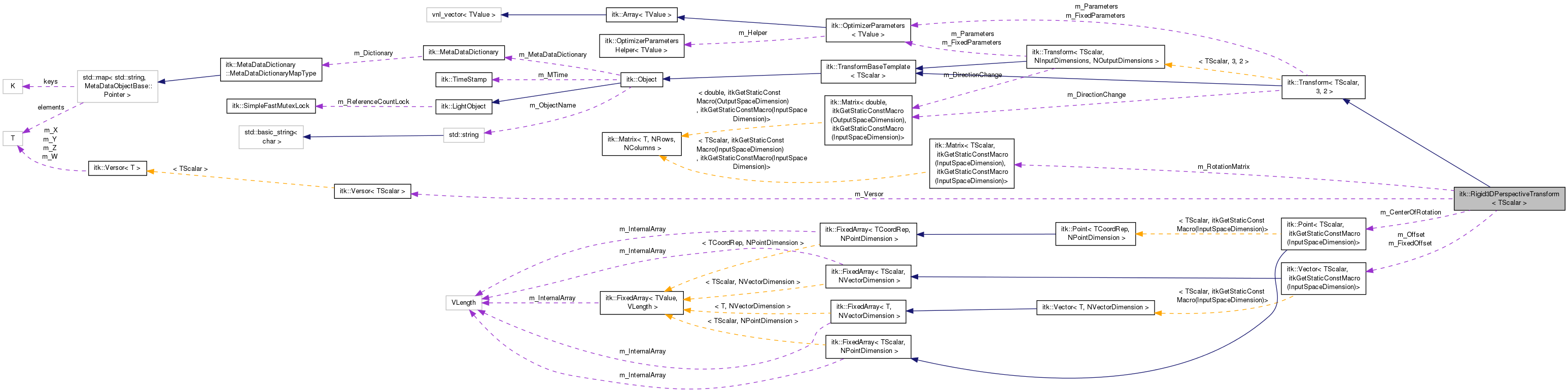
 Inheritance diagram for itk::Rigid3DPerspectiveTransform< TScalar >: Collaboration diagram for itk::Rigid3DPerspectiveTransform< TScalar >:
Inheritance diagram for itk::Rigid3DPerspectiveTransform< TScalar >: Collaboration diagram for itk::Rigid3DPerspectiveTransform< TScalar >:Rigid3DTramsform of a vector space (e.g. space coordinates)
This transform applies a rotation and translation to the 3D space followed by a projection to 2D space along the Z axis.
Definition at line 39 of file itkRigid3DPerspectiveTransform.h.
Public Types | |
| typedef VersorType::ValueType | AngleType |
| typedef VersorType::VectorType | AxisType |
| typedef AxisType::ValueType | AxisValueType |
| typedef SmartPointer< const Self > | ConstPointer |
| typedef Superclass::InputCovariantVectorType | InputCovariantVectorType |
| typedef Superclass::InputVnlVectorType | InputVnlVectorType |
| typedef Superclass::JacobianType | JacobianType |
| typedef Matrix< TScalar, itkGetStaticConstMacro(InputSpaceDimension), itkGetStaticConstMacro(InputSpaceDimension)> | MatrixType |
| typedef Vector< TScalar, itkGetStaticConstMacro(InputSpaceDimension)> | OffsetType |
| typedef OffsetType::ValueType | OffsetValueType |
| typedef Superclass::OutputCovariantVectorType | OutputCovariantVectorType |
| typedef Superclass::OutputVnlVectorType | OutputVnlVectorType |
| typedef Superclass::ParametersType | ParametersType |
| typedef ParametersType::ValueType | ParameterValueType |
| typedef SmartPointer< Self > | Pointer |
| typedef Superclass::ScalarType | ScalarType |
| typedef Versor< TScalar > | VersorType |
| typedef vnl_quaternion< TScalar > | VnlQuaternionType |
| typedef Rigid3DPerspectiveTransform | Self |
| typedef Transform< TScalar, itkGetStaticConstMacro(InputSpaceDimension), itkGetStaticConstMacro(OutputSpaceDimension)> | Superclass |
| typedef Vector< TScalar, itkGetStaticConstMacro(InputSpaceDimension)> | InputVectorType |
| typedef Vector< TScalar, itkGetStaticConstMacro(OutputSpaceDimension)> | OutputVectorType |
| typedef Point< TScalar, itkGetStaticConstMacro(InputSpaceDimension)> | InputPointType |
| typedef Point< TScalar, itkGetStaticConstMacro(OutputSpaceDimension)> | OutputPointType |
| Public Types inherited from itk::Transform< TScalar, 3, 2 > | |
| typedef SmartPointer< const Self > | ConstPointer |
| typedef Array < ParametersValueType > | DerivativeType |
| typedef Matrix< double, itkGetStaticConstMacro(OutputSpaceDimension), itkGetStaticConstMacro(InputSpaceDimension)> | DirectionChangeMatrix |
| typedef CovariantVector < TScalar, NInputDimensions > | InputCovariantVectorType |
| typedef DiffusionTensor3D < TScalar > | InputDiffusionTensor3DType |
| typedef Matrix< double, itkGetStaticConstMacro(InputSpaceDimension), itkGetStaticConstMacro(InputSpaceDimension)> | InputDirectionMatrix |
| typedef Point< TScalar, NInputDimensions > | InputPointType |
| typedef SymmetricSecondRankTensor < TScalar, NInputDimensions > | InputSymmetricSecondRankTensorType |
| typedef VariableLengthVector < TScalar > | InputVectorPixelType |
| typedef Vector< TScalar, NInputDimensions > | InputVectorType |
| typedef vnl_vector_fixed < TScalar, NInputDimensions > | InputVnlVectorType |
| typedef InverseTransformBaseType::Pointer | InverseTransformBasePointer |
| typedef Transform< TScalar, NOutputDimensions, NInputDimensions > | InverseTransformBaseType |
| typedef Array2D < ParametersValueType > | JacobianType |
| typedef Matrix< TScalar, itkGetStaticConstMacro(OutputSpaceDimension), itkGetStaticConstMacro(InputSpaceDimension)> | MatrixType |
| typedef Superclass::NumberOfParametersType | NumberOfParametersType |
| typedef CovariantVector < TScalar, NOutputDimensions > | OutputCovariantVectorType |
| typedef DiffusionTensor3D < TScalar > | OutputDiffusionTensor3DType |
| typedef Matrix< double, itkGetStaticConstMacro(OutputSpaceDimension), itkGetStaticConstMacro(OutputSpaceDimension)> | OutputDirectionMatrix |
| typedef Point< TScalar, NOutputDimensions > | OutputPointType |
| typedef SymmetricSecondRankTensor < TScalar, NOutputDimensions > | OutputSymmetricSecondRankTensorType |
| typedef VariableLengthVector < TScalar > | OutputVectorPixelType |
| typedef Vector< TScalar, NOutputDimensions > | OutputVectorType |
| typedef vnl_vector_fixed < TScalar, NOutputDimensions > | OutputVnlVectorType |
| typedef Superclass::ParametersType | ParametersType |
| typedef Superclass::ParametersValueType | ParametersValueType |
| typedef SmartPointer< Self > | Pointer |
| typedef TScalar | ScalarType |
| typedef Transform | Self |
| typedef TransformBaseTemplate < TScalar > | Superclass |
| typedef Superclass::TransformCategoryType | TransformCategoryType |
| Public Types inherited from itk::TransformBaseTemplate< TScalar > | |
| typedef SmartPointer< const Self > | ConstPointer |
| typedef IdentifierType | NumberOfParametersType |
| typedef OptimizerParameters < ParametersValueType > | ParametersType |
| typedef TScalar | ParametersValueType |
| typedef SmartPointer< Self > | Pointer |
| typedef TransformBaseTemplate | Self |
| typedef Object | Superclass |
| enum | TransformCategoryType { UnknownTransformCategory =0, Linear =1, BSpline =2, Spline =3, DisplacementField =4, VelocityField =5 } |
| Public Types inherited from itk::Object | |
| typedef SmartPointer< const Self > | ConstPointer |
| typedef SmartPointer< Self > | Pointer |
| typedef Object | Self |
| typedef LightObject | Superclass |
| Public Types inherited from itk::LightObject | |
| typedef SmartPointer< const Self > | ConstPointer |
| typedef SmartPointer< Self > | Pointer |
| typedef LightObject | Self |
Static Public Member Functions | |
| static Pointer | New () |
| Static Public Member Functions inherited from itk::Object | |
| static bool | GetGlobalWarningDisplay () |
| static void | GlobalWarningDisplayOff () |
| static void | GlobalWarningDisplayOn () |
| static Pointer | New () |
| static void | SetGlobalWarningDisplay (bool flag) |
| Static Public Member Functions inherited from itk::LightObject | |
| static void | BreakOnError () |
| static Pointer | New () |
Static Public Attributes | |
| static const unsigned int | InputSpaceDimension = 3 |
| static const unsigned int | OutputSpaceDimension = 2 |
| static const unsigned int | SpaceDimension = 3 |
| static const unsigned int | ParametersDimension = 6 |
| Static Public Attributes inherited from itk::Transform< TScalar, 3, 2 > | |
| static const unsigned int | InputSpaceDimension |
| static const unsigned int | OutputSpaceDimension |
Protected Member Functions | |
| void | PrintSelf (std::ostream &os, Indent indent) const |
| Rigid3DPerspectiveTransform () | |
| ~Rigid3DPerspectiveTransform () | |
| Protected Member Functions inherited from itk::Transform< TScalar, 3, 2 > | |
| virtual LightObject::Pointer | InternalClone () const |
| OutputDiffusionTensor3DType | PreservationOfPrincipalDirectionDiffusionTensor3DReorientation (const InputDiffusionTensor3DType, const JacobianType) const |
| Transform () | |
| Transform (NumberOfParametersType NumberOfParameters) | |
| virtual | ~Transform () |
| Protected Member Functions inherited from itk::TransformBaseTemplate< TScalar > | |
| TransformBaseTemplate () | |
| virtual | ~TransformBaseTemplate () |
| Protected Member Functions inherited from itk::Object | |
| Object () | |
| bool | PrintObservers (std::ostream &os, Indent indent) const |
| virtual void | SetTimeStamp (const TimeStamp &time) |
| virtual | ~Object () |
| Protected Member Functions inherited from itk::LightObject | |
| LightObject () | |
| virtual void | PrintHeader (std::ostream &os, Indent indent) const |
| virtual void | PrintTrailer (std::ostream &os, Indent indent) const |
| virtual | ~LightObject () |
Private Member Functions | |
| void | operator= (const Self &) |
| Rigid3DPerspectiveTransform (const Self &) | |
Private Attributes | |
| InputPointType | m_CenterOfRotation |
| OffsetType | m_FixedOffset |
| TScalar | m_FocalDistance |
| OffsetType | m_Offset |
| MatrixType | m_RotationMatrix |
| VersorType | m_Versor |
Additional Inherited Members | |
| Protected Types inherited from itk::LightObject | |
| typedef int | InternalReferenceCountType |
| Protected Attributes inherited from itk::Transform< TScalar, 3, 2 > | |
| DirectionChangeMatrix | m_DirectionChange |
| ParametersType | m_FixedParameters |
| ParametersType | m_Parameters |
| Protected Attributes inherited from itk::LightObject | |
| InternalReferenceCountType | m_ReferenceCount |
| SimpleFastMutexLock | m_ReferenceCountLock |
| typedef VersorType::ValueType itk::Rigid3DPerspectiveTransform< TScalar >::AngleType |
Definition at line 111 of file itkRigid3DPerspectiveTransform.h.
| typedef VersorType::VectorType itk::Rigid3DPerspectiveTransform< TScalar >::AxisType |
Definition at line 110 of file itkRigid3DPerspectiveTransform.h.
| typedef AxisType::ValueType itk::Rigid3DPerspectiveTransform< TScalar >::AxisValueType |
Definition at line 112 of file itkRigid3DPerspectiveTransform.h.
| typedef SmartPointer<const Self> itk::Rigid3DPerspectiveTransform< TScalar >::ConstPointer |
Definition at line 61 of file itkRigid3DPerspectiveTransform.h.
| typedef Superclass::InputCovariantVectorType itk::Rigid3DPerspectiveTransform< TScalar >::InputCovariantVectorType |
Standard covariant vector type for this class
Definition at line 93 of file itkRigid3DPerspectiveTransform.h.
| typedef Point<TScalar, itkGetStaticConstMacro(InputSpaceDimension)> itk::Rigid3DPerspectiveTransform< TScalar >::InputPointType |
Standard coordinate point type for this class.
Definition at line 97 of file itkRigid3DPerspectiveTransform.h.
| typedef Vector<TScalar, itkGetStaticConstMacro(InputSpaceDimension)> itk::Rigid3DPerspectiveTransform< TScalar >::InputVectorType |
Standard vector type for this class.
Definition at line 88 of file itkRigid3DPerspectiveTransform.h.
| typedef Superclass::InputVnlVectorType itk::Rigid3DPerspectiveTransform< TScalar >::InputVnlVectorType |
Standard vnl_vector type for this class.
Definition at line 105 of file itkRigid3DPerspectiveTransform.h.
| typedef Superclass::JacobianType itk::Rigid3DPerspectiveTransform< TScalar >::JacobianType |
Jacobian type.
Definition at line 77 of file itkRigid3DPerspectiveTransform.h.
| typedef Matrix<TScalar, itkGetStaticConstMacro(InputSpaceDimension), itkGetStaticConstMacro(InputSpaceDimension)> itk::Rigid3DPerspectiveTransform< TScalar >::MatrixType |
Standard matrix type for this class.
Definition at line 81 of file itkRigid3DPerspectiveTransform.h.
| typedef Vector<TScalar, itkGetStaticConstMacro(InputSpaceDimension)> itk::Rigid3DPerspectiveTransform< TScalar >::OffsetType |
Standard vector type for this class.
Definition at line 84 of file itkRigid3DPerspectiveTransform.h.
| typedef OffsetType::ValueType itk::Rigid3DPerspectiveTransform< TScalar >::OffsetValueType |
Definition at line 85 of file itkRigid3DPerspectiveTransform.h.
| typedef Superclass::OutputCovariantVectorType itk::Rigid3DPerspectiveTransform< TScalar >::OutputCovariantVectorType |
Definition at line 94 of file itkRigid3DPerspectiveTransform.h.
| typedef Point<TScalar, itkGetStaticConstMacro(OutputSpaceDimension)> itk::Rigid3DPerspectiveTransform< TScalar >::OutputPointType |
Standard coordinate point type for this class.
Definition at line 98 of file itkRigid3DPerspectiveTransform.h.
| typedef Vector<TScalar, itkGetStaticConstMacro(OutputSpaceDimension)> itk::Rigid3DPerspectiveTransform< TScalar >::OutputVectorType |
Standard vector type for this class.
Definition at line 89 of file itkRigid3DPerspectiveTransform.h.
| typedef Superclass::OutputVnlVectorType itk::Rigid3DPerspectiveTransform< TScalar >::OutputVnlVectorType |
Definition at line 106 of file itkRigid3DPerspectiveTransform.h.
| typedef Superclass::ParametersType itk::Rigid3DPerspectiveTransform< TScalar >::ParametersType |
Parameters type.
Definition at line 73 of file itkRigid3DPerspectiveTransform.h.
| typedef ParametersType::ValueType itk::Rigid3DPerspectiveTransform< TScalar >::ParameterValueType |
Definition at line 74 of file itkRigid3DPerspectiveTransform.h.
| typedef SmartPointer<Self> itk::Rigid3DPerspectiveTransform< TScalar >::Pointer |
Definition at line 60 of file itkRigid3DPerspectiveTransform.h.
| typedef Superclass::ScalarType itk::Rigid3DPerspectiveTransform< TScalar >::ScalarType |
Scalar type.
Definition at line 67 of file itkRigid3DPerspectiveTransform.h.
| typedef Rigid3DPerspectiveTransform itk::Rigid3DPerspectiveTransform< TScalar >::Self |
Standard class typedefs.
Definition at line 54 of file itkRigid3DPerspectiveTransform.h.
| typedef Transform<TScalar, itkGetStaticConstMacro(InputSpaceDimension), itkGetStaticConstMacro(OutputSpaceDimension)> itk::Rigid3DPerspectiveTransform< TScalar >::Superclass |
Standard class typedefs.
Definition at line 57 of file itkRigid3DPerspectiveTransform.h.
| typedef Versor< TScalar > itk::Rigid3DPerspectiveTransform< TScalar >::VersorType |
Versor type.
Definition at line 109 of file itkRigid3DPerspectiveTransform.h.
| typedef vnl_quaternion<TScalar> itk::Rigid3DPerspectiveTransform< TScalar >::VnlQuaternionType |
Standard vnl_quaternion type.
Definition at line 102 of file itkRigid3DPerspectiveTransform.h.
|
protected |
|
protected |
|
private |
|
virtual |
Compute the Jacobian Matrix of the transformation at one point, allowing for thread-safety.
|
inlinevirtual |
Definition at line 218 of file itkRigid3DPerspectiveTransform.h.
References itk::Rigid3DPerspectiveTransform< TScalar >::GetNameOfClass().
| void itk::Rigid3DPerspectiveTransform< TScalar >::ComputeMatrix | ( | void | ) |
Compute the matrix.
|
virtual |
Create an object from an instance, potentially deferring to a factory. This method allows you to create an instance of an object that is exactly the same type as the referring object. This is useful in cases where an object has been cast back to a base class.
Reimplemented from itk::Object.
|
virtual |
Set the center of Rotation
|
virtual |
Set a fixed offset: this allow to center the object to be transformed
|
inline |
Return the Focal Distance
Definition at line 171 of file itkRigid3DPerspectiveTransform.h.
References itk::Rigid3DPerspectiveTransform< TScalar >::m_FocalDistance.
|
virtual |
Run-time type information (and related methods).
Reimplemented from itk::Transform< TScalar, 3, 2 >.
Referenced by itk::Rigid3DPerspectiveTransform< TScalar >::ComputeJacobianWithRespectToPosition().
|
inline |
Get offset of an Rigid3DPerspectiveTransform This method returns the value of the offset of the Rigid3DPerspectiveTransform.
Definition at line 117 of file itkRigid3DPerspectiveTransform.h.
References itk::Rigid3DPerspectiveTransform< TScalar >::m_Offset.
|
virtual |
Get the Transformation Parameters.
Reimplemented from itk::Transform< TScalar, 3, 2 >.
|
inline |
Get rotation from an Rigid3DPerspectiveTransform. This method returns the value of the rotation of the Rigid3DPerspectiveTransform.
Definition at line 125 of file itkRigid3DPerspectiveTransform.h.
References itk::Rigid3DPerspectiveTransform< TScalar >::m_Versor.
|
inline |
Return the rotation matrix
Definition at line 206 of file itkRigid3DPerspectiveTransform.h.
References itk::Rigid3DPerspectiveTransform< TScalar >::m_RotationMatrix.
|
static |
New macro for creation of through a Smart Pointer.
|
private |
|
protectedvirtual |
Methods invoked by Print() to print information about the object including superclasses. Typically not called by the user (use Print() instead) but used in the hierarchical print process to combine the output of several classes.
Reimplemented from itk::Object.
|
virtual |
Set the center of Rotation
|
virtual |
Set a fixed offset: this allow to center the object to be transformed
|
inlinevirtual |
Set the fixed parameters and update internal transformation. This transform has no fixed paramaters
Definition at line 141 of file itkRigid3DPerspectiveTransform.h.
|
inline |
Set the Focal Distance of the projection This method sets the focal distance for the perspective projection to a value specified by the user.
Definition at line 165 of file itkRigid3DPerspectiveTransform.h.
References itk::Rigid3DPerspectiveTransform< TScalar >::m_FocalDistance.
|
inline |
This method sets the offset of an Rigid3DPerspectiveTransform to a value specified by the user.
Definition at line 147 of file itkRigid3DPerspectiveTransform.h.
References itk::Rigid3DPerspectiveTransform< TScalar >::m_Offset.
| void itk::Rigid3DPerspectiveTransform< TScalar >::SetParameters | ( | const ParametersType & | parameters | ) |
Set/Get the transformation from a container of parameters. This is typically used by optimizers. There are 6 parameters. The first three represent the versor and the last three represents the offset.
| void itk::Rigid3DPerspectiveTransform< TScalar >::SetRotation | ( | const VersorType & | rotation | ) |
This method sets the rotation of an Rigid3DPerspectiveTransform to a value specified by the user.
| void itk::Rigid3DPerspectiveTransform< TScalar >::SetRotation | ( | const Vector< TScalar, 3 > & | axis, |
| double | angle | ||
| ) |
Set Rotation of the Rigid transform. This method sets the rotation of an Rigid3DTransform to a value specified by the user using the axis of rotation an the angle.
|
inlinevirtual |
Definition at line 198 of file itkRigid3DPerspectiveTransform.h.
| OutputPointType itk::Rigid3DPerspectiveTransform< TScalar >::TransformPoint | ( | const InputPointType & | point | ) | const |
Transform by a Rigid3DPerspectiveTransform. This method applies the transform given by self to a given point, returning the transformed point.
|
inlinevirtual |
Definition at line 184 of file itkRigid3DPerspectiveTransform.h.
|
inlinevirtual |
Definition at line 190 of file itkRigid3DPerspectiveTransform.h.
|
static |
Dimension of the domain space.
Definition at line 44 of file itkRigid3DPerspectiveTransform.h.
|
private |
Center of rotation
Definition at line 260 of file itkRigid3DPerspectiveTransform.h.
|
private |
Fixed offset
Definition at line 257 of file itkRigid3DPerspectiveTransform.h.
|
private |
Set Focal distance of the projection.
Definition at line 251 of file itkRigid3DPerspectiveTransform.h.
Referenced by itk::Rigid3DPerspectiveTransform< TScalar >::GetFocalDistance(), and itk::Rigid3DPerspectiveTransform< TScalar >::SetFocalDistance().
|
private |
Offset of the transformation.
Definition at line 245 of file itkRigid3DPerspectiveTransform.h.
Referenced by itk::Rigid3DPerspectiveTransform< TScalar >::GetOffset(), and itk::Rigid3DPerspectiveTransform< TScalar >::SetOffset().
|
private |
Matrix representation of the rotation.
Definition at line 254 of file itkRigid3DPerspectiveTransform.h.
Referenced by itk::Rigid3DPerspectiveTransform< TScalar >::GetRotationMatrix().
|
private |
Rotation of the transformation.
Definition at line 248 of file itkRigid3DPerspectiveTransform.h.
Referenced by itk::Rigid3DPerspectiveTransform< TScalar >::GetRotation().
|
static |
Dimension of the domain space.
Definition at line 45 of file itkRigid3DPerspectiveTransform.h.
|
static |
Dimension of parameters.
Definition at line 50 of file itkRigid3DPerspectiveTransform.h.
|
static |
Dimension of parameters.
Definition at line 49 of file itkRigid3DPerspectiveTransform.h.
 1.8.5
1.8.5