template<typename TParametersValueType = double>
class itk::QuaternionRigidTransform< TParametersValueType >
QuaternionRigidTransform of a vector space (e.g. space coordinates).
This transform applies a rotation and translation to the space given a quaternion and a 3D translation. Rotation is about a user specified center.
The parameters for this transform can be set either using individual Set methods or in serialized form using SetParameters() and SetFixedParameters().
The serialization of the optimizable parameters is an array of 7 elements. The first 4 elements are the components of the quaternion representation of 3D rotation. The last 3 parameters defines the translation in each dimension.
The serialization of the fixed parameters is an array of 3 elements defining the center of rotation.
Definition at line 48 of file itkQuaternionRigidTransform.h.
|
| using | CenterType = typename Superclass::CenterType |
| |
| using | ConstPointer = SmartPointer< const Self > |
| |
| using | FixedParametersType = typename Superclass::FixedParametersType |
| |
| using | FixedParametersValueType = typename Superclass::FixedParametersValueType |
| |
| using | InputCovariantVectorType = typename Superclass::InputCovariantVectorType |
| |
| using | InputPointType = typename Superclass::InputPointType |
| |
| using | InputVectorType = typename Superclass::InputVectorType |
| |
| using | InputVnlVectorType = typename Superclass::InputVnlVectorType |
| |
| using | InverseJacobianPositionType = typename Superclass::InverseJacobianPositionType |
| |
| using | InverseMatrixType = typename Superclass::InverseMatrixType |
| |
| using | JacobianPositionType = typename Superclass::JacobianPositionType |
| |
| using | JacobianType = typename Superclass::JacobianType |
| |
| using | MatrixType = typename Superclass::MatrixType |
| |
| using | OffsetType = typename Superclass::OffsetType |
| |
| using | OutputCovariantVectorType = typename Superclass::OutputCovariantVectorType |
| |
| using | OutputPointType = typename Superclass::OutputPointType |
| |
| using | OutputVectorType = typename Superclass::OutputVectorType |
| |
| using | OutputVectorValueType = typename Superclass::OutputVectorValueType |
| |
| using | OutputVnlVectorType = typename Superclass::OutputVnlVectorType |
| |
| using | ParametersType = typename Superclass::ParametersType |
| |
| using | ParametersValueType = typename Superclass::ParametersValueType |
| |
| using | Pointer = SmartPointer< Self > |
| |
| using | ScalarType = typename Superclass::ScalarType |
| |
| using | Self = QuaternionRigidTransform |
| |
| using | Superclass = Rigid3DTransform< TParametersValueType > |
| |
| using | TranslationType = typename Superclass::TranslationType |
| |
| using | VnlQuaternionType = vnl_quaternion< TParametersValueType > |
| |
| using | CenterType = typename Superclass::CenterType |
| |
| using | ConstPointer = SmartPointer< const Self > |
| |
| using | FixedParametersType = typename Superclass::FixedParametersType |
| |
| using | FixedParametersValueType = typename Superclass::FixedParametersValueType |
| |
| using | InputCovariantVectorType = typename Superclass::InputCovariantVectorType |
| |
| using | InputPointType = typename Superclass::InputPointType |
| |
| using | InputVectorType = typename Superclass::InputVectorType |
| |
| using | InputVnlVectorType = typename Superclass::InputVnlVectorType |
| |
| using | InverseJacobianPositionType = typename Superclass::InverseJacobianPositionType |
| |
| using | InverseMatrixType = typename Superclass::InverseMatrixType |
| |
| using | InverseTransformBasePointer = typename InverseTransformBaseType::Pointer |
| |
| using | InverseTransformBaseType = typename Superclass::InverseTransformBaseType |
| |
| using | JacobianPositionType = typename Superclass::JacobianPositionType |
| |
| using | JacobianType = typename Superclass::JacobianType |
| |
| using | MatrixType = typename Superclass::MatrixType |
| |
| using | MatrixValueType = typename Superclass::MatrixValueType |
| |
| using | OffsetType = typename Superclass::OffsetType |
| |
| using | OutputCovariantVectorType = typename Superclass::OutputCovariantVectorType |
| |
| using | OutputPointType = typename Superclass::OutputPointType |
| |
| using | OutputVectorType = typename Superclass::OutputVectorType |
| |
| using | OutputVectorValueType = typename Superclass::OutputVectorValueType |
| |
| using | OutputVnlVectorType = typename Superclass::OutputVnlVectorType |
| |
| using | ParametersType = typename Superclass::ParametersType |
| |
| using | ParametersValueType = typename Superclass::ParametersValueType |
| |
| using | Pointer = SmartPointer< Self > |
| |
| using | ScalarType = typename Superclass::ScalarType |
| |
| using | Self = Rigid3DTransform |
| |
| using | Superclass = MatrixOffsetTransformBase< TParametersValueType, 3, 3 > |
| |
| using | TranslationType = typename Superclass::TranslationType |
| |
| using | CenterType = InputPointType |
| |
| using | ConstPointer = SmartPointer< const Self > |
| |
| using | FixedParametersType = typename Superclass::FixedParametersType |
| |
| using | FixedParametersValueType = typename Superclass::FixedParametersValueType |
| |
| using | InputCovariantVectorType = CovariantVector< TParametersValueType, Self::InputSpaceDimension > |
| |
| using | InputDiffusionTensor3DType = typename Superclass::InputDiffusionTensor3DType |
| |
| using | InputPointType = Point< TParametersValueType, Self::InputSpaceDimension > |
| |
| using | InputPointValueType = typename InputPointType::ValueType |
| |
| using | InputSymmetricSecondRankTensorType = typename Superclass::InputSymmetricSecondRankTensorType |
| |
| using | InputTensorEigenVectorType = CovariantVector< TParametersValueType, InputDiffusionTensor3DType::Dimension > |
| |
| using | InputVectorPixelType = typename Superclass::InputVectorPixelType |
| |
| using | InputVectorType = Vector< TParametersValueType, Self::InputSpaceDimension > |
| |
| using | InputVnlVectorType = vnl_vector_fixed< TParametersValueType, Self::InputSpaceDimension > |
| |
| using | InverseJacobianPositionType = typename Superclass::InverseJacobianPositionType |
| |
| using | InverseMatrixType = Matrix< TParametersValueType, Self::InputSpaceDimension, Self::OutputSpaceDimension > |
| |
| using | InverseTransformBasePointer = typename InverseTransformBaseType::Pointer |
| |
| using | InverseTransformBaseType = typename Superclass::InverseTransformBaseType |
| |
| using | JacobianPositionType = typename Superclass::JacobianPositionType |
| |
| using | JacobianType = typename Superclass::JacobianType |
| |
| using | MatrixType = Matrix< TParametersValueType, Self::OutputSpaceDimension, Self::InputSpaceDimension > |
| |
| using | MatrixValueType = typename MatrixType::ValueType |
| |
| using | OffsetType = OutputVectorType |
| |
| using | OffsetValueType = typename OffsetType::ValueType |
| |
| using | OutputCovariantVectorType = CovariantVector< TParametersValueType, Self::OutputSpaceDimension > |
| |
| using | OutputDiffusionTensor3DType = typename Superclass::OutputDiffusionTensor3DType |
| |
| using | OutputPointType = Point< TParametersValueType, Self::OutputSpaceDimension > |
| |
| using | OutputPointValueType = typename OutputPointType::ValueType |
| |
| using | OutputSymmetricSecondRankTensorType = typename Superclass::OutputSymmetricSecondRankTensorType |
| |
| using | OutputVectorPixelType = typename Superclass::OutputVectorPixelType |
| |
| using | OutputVectorType = Vector< TParametersValueType, Self::OutputSpaceDimension > |
| |
| using | OutputVectorValueType = typename OutputVectorType::ValueType |
| |
| using | OutputVnlVectorType = vnl_vector_fixed< TParametersValueType, Self::OutputSpaceDimension > |
| |
| using | ParametersType = typename Superclass::ParametersType |
| |
| using | ParametersValueType = typename Superclass::ParametersValueType |
| |
| using | Pointer = SmartPointer< Self > |
| |
| using | ScalarType = typename Superclass::ScalarType |
| |
| using | Self = MatrixOffsetTransformBase |
| |
| using | Superclass = Transform< TParametersValueType, NInputDimensions, NOutputDimensions > |
| |
| using | TransformCategoryType = typename Superclass::TransformCategoryType |
| |
| using | TranslationType = OutputVectorType |
| |
| using | TranslationValueType = typename TranslationType::ValueType |
| |
| using | ConstPointer = SmartPointer< const Self > |
| |
| using | DerivativeType = Array< ParametersValueType > |
| |
| using | DirectionChangeMatrix = Matrix< double, Self::OutputSpaceDimension, Self::InputSpaceDimension > |
| |
| using | FixedParametersType = typename Superclass::FixedParametersType |
| |
| using | FixedParametersValueType = typename Superclass::FixedParametersValueType |
| |
| using | InputCovariantVectorType = CovariantVector< TParametersValueType, NInputDimensions > |
| |
| using | InputDiffusionTensor3DType = DiffusionTensor3D< TParametersValueType > |
| |
| using | InputDirectionMatrix = Matrix< double, Self::InputSpaceDimension, Self::InputSpaceDimension > |
| |
| using | InputPointType = Point< TParametersValueType, NInputDimensions > |
| |
| using | InputSymmetricSecondRankTensorType = SymmetricSecondRankTensor< TParametersValueType, NInputDimensions > |
| |
| using | InputVectorPixelType = VariableLengthVector< TParametersValueType > |
| |
| using | InputVectorType = Vector< TParametersValueType, NInputDimensions > |
| |
| using | InputVnlVectorType = vnl_vector_fixed< TParametersValueType, NInputDimensions > |
| |
| using | InverseJacobianPositionType = vnl_matrix_fixed< ParametersValueType, NInputDimensions, NOutputDimensions > |
| |
| using | InverseTransformBasePointer = typename InverseTransformBaseType::Pointer |
| |
| using | InverseTransformBaseType = Transform< TParametersValueType, NOutputDimensions, NInputDimensions > |
| |
| using | JacobianPositionType = vnl_matrix_fixed< ParametersValueType, NOutputDimensions, NInputDimensions > |
| |
| using | JacobianType = Array2D< ParametersValueType > |
| |
| using | MatrixType = Matrix< TParametersValueType, Self::OutputSpaceDimension, Self::InputSpaceDimension > |
| |
| using | NumberOfParametersType = typename Superclass::NumberOfParametersType |
| |
| using | OutputCovariantVectorType = CovariantVector< TParametersValueType, NOutputDimensions > |
| |
| using | OutputDiffusionTensor3DType = DiffusionTensor3D< TParametersValueType > |
| |
| using | OutputDirectionMatrix = Matrix< double, Self::OutputSpaceDimension, Self::OutputSpaceDimension > |
| |
| using | OutputPointType = Point< TParametersValueType, NOutputDimensions > |
| |
| using | OutputSymmetricSecondRankTensorType = SymmetricSecondRankTensor< TParametersValueType, NOutputDimensions > |
| |
| using | OutputVectorPixelType = VariableLengthVector< TParametersValueType > |
| |
| using | OutputVectorType = Vector< TParametersValueType, NOutputDimensions > |
| |
| using | OutputVnlVectorType = vnl_vector_fixed< TParametersValueType, NOutputDimensions > |
| |
| using | ParametersType = typename Superclass::ParametersType |
| |
| using | ParametersValueType = typename Superclass::ParametersValueType |
| |
| using | Pointer = SmartPointer< Self > |
| |
| using | ScalarType = ParametersValueType |
| |
| using | Self = Transform |
| |
| using | Superclass = TransformBaseTemplate< TParametersValueType > |
| |
| using | TransformCategoryType = typename Superclass::TransformCategoryType |
| |
| using | ConstPointer = SmartPointer< const Self > |
| |
| using | FixedParametersType = OptimizerParameters< FixedParametersValueType > |
| |
| using | FixedParametersValueType = double |
| |
| using | NumberOfParametersType = IdentifierType |
| |
| using | ParametersType = OptimizerParameters< ParametersValueType > |
| |
| using | ParametersValueType = TParametersValueType |
| |
| using | Pointer = SmartPointer< Self > |
| |
| using | Self = TransformBaseTemplate |
| |
| using | Superclass = Object |
| |
| enum | TransformCategoryType {
UnknownTransformCategory =0,
Linear =1,
BSpline =2,
Spline =3,
DisplacementField =4,
VelocityField =5
} |
| |
| using | ConstPointer = SmartPointer< const Self > |
| |
| using | Pointer = SmartPointer< Self > |
| |
| using | Self = Object |
| |
| using | Superclass = LightObject |
| |
| using | ConstPointer = SmartPointer< const Self > |
| |
| using | Pointer = SmartPointer< Self > |
| |
| using | Self = LightObject |
| |
|
| void | ComputeJacobianWithRespectToParameters (const InputPointType &p, JacobianType &jacobian) const override |
| |
| virtual ::itk::LightObject::Pointer | CreateAnother () const |
| |
| virtual const char * | GetNameOfClass () const |
| |
| const ParametersType & | GetParameters () const override |
| |
| const VnlQuaternionType & | GetRotation () const |
| |
| void | SetIdentity () override |
| |
| void | SetParameters (const ParametersType ¶meters) override |
| |
| void | SetRotation (const VnlQuaternionType &rotation) |
| |
| virtual ::itk::LightObject::Pointer | CreateAnother () const |
| |
| bool | MatrixIsOrthogonal (const MatrixType &matrix, const TParametersValueType tolerance=MatrixOrthogonalityTolerance< TParametersValueType >::GetTolerance()) |
| |
| void | SetMatrix (const MatrixType &matrix) override |
| |
| virtual void | SetMatrix (const MatrixType &matrix, const TParametersValueType tolerance) |
| |
| void | SetParameters (const ParametersType ¶meters) override |
| |
| void | Translate (const OffsetType &offset, bool pre=false) |
| |
| void | Compose (const Self *other, bool pre=false) |
| |
| void | ComputeInverseJacobianWithRespectToPosition (const InputPointType &x, InverseJacobianPositionType &jac) const override |
| |
| void | ComputeJacobianWithRespectToParameters (const InputPointType &x, JacobianType &j) const override |
| |
| void | ComputeJacobianWithRespectToPosition (const InputPointType &x, JacobianPositionType &jac) const override |
| |
| virtual ::itk::LightObject::Pointer | CreateAnother () const |
| |
| const InputPointType & | GetCenter () const |
| |
| const FixedParametersType & | GetFixedParameters () const override |
| |
| InverseTransformBasePointer | GetInverseTransform () const override |
| |
| virtual const MatrixType & | GetMatrix () const |
| |
| const OutputVectorType & | GetOffset () const |
| |
| const ParametersType & | GetParameters () const override |
| |
| TransformCategoryType | GetTransformCategory () const override |
| |
| const OutputVectorType & | GetTranslation () const |
| |
| bool | IsLinear () const override |
| |
| void | SetFixedParameters (const FixedParametersType &) override |
| |
| void | SetParameters (const ParametersType ¶meters) override |
| |
| OutputCovariantVectorType | TransformCovariantVector (const InputCovariantVectorType &vector) const override |
| |
| OutputVectorPixelType | TransformCovariantVector (const InputVectorPixelType &vector) const override |
| |
| OutputDiffusionTensor3DType | TransformDiffusionTensor3D (const InputDiffusionTensor3DType &tensor) const override |
| |
| OutputVectorPixelType | TransformDiffusionTensor3D (const InputVectorPixelType &tensor) const override |
| |
| OutputPointType | TransformPoint (const InputPointType &point) const override |
| |
| OutputSymmetricSecondRankTensorType | TransformSymmetricSecondRankTensor (const InputSymmetricSecondRankTensorType &tensor) const override |
| |
| OutputVectorPixelType | TransformSymmetricSecondRankTensor (const InputVectorPixelType &tensor) const override |
| |
| OutputVectorType | TransformVector (const InputVectorType &vector) const override |
| |
| OutputVnlVectorType | TransformVector (const InputVnlVectorType &vector) const override |
| |
| OutputVectorPixelType | TransformVector (const InputVectorPixelType &vector) const override |
| |
| virtual void | SetMatrix (const MatrixType &matrix) |
| |
| void | SetOffset (const OutputVectorType &offset) |
| |
| void | SetCenter (const InputPointType ¢er) |
| |
| void | SetTranslation (const OutputVectorType &translation) |
| |
| bool | GetInverse (Self *inverse) const |
| |
| virtual void | ComputeJacobianWithRespectToParametersCachedTemporaries (const InputPointType &p, JacobianType &jacobian, JacobianType &) const |
| |
| void | CopyInFixedParameters (const FixedParametersValueType *const begin, const FixedParametersValueType *const end) override |
| |
| void | CopyInParameters (const ParametersValueType *const begin, const ParametersValueType *const end) override |
| |
| unsigned int | GetInputSpaceDimension () const override |
| |
| bool | GetInverse (Self *) const |
| |
| virtual NumberOfParametersType | GetNumberOfFixedParameters () const |
| |
| virtual NumberOfParametersType | GetNumberOfLocalParameters () const |
| |
| NumberOfParametersType | GetNumberOfParameters () const override |
| |
| unsigned int | GetOutputSpaceDimension () const override |
| |
| std::string | GetTransformTypeAsString () const override |
| |
| | itkCloneMacro (Self) |
| |
| void | SetParametersByValue (const ParametersType &p) override |
| |
| virtual OutputCovariantVectorType | TransformCovariantVector (const InputCovariantVectorType &vector, const InputPointType &point) const |
| |
| virtual OutputVectorPixelType | TransformCovariantVector (const InputVectorPixelType &vector, const InputPointType &point) const |
| |
| virtual OutputDiffusionTensor3DType | TransformDiffusionTensor3D (const InputDiffusionTensor3DType &tensor, const InputPointType &point) const |
| |
| virtual OutputVectorPixelType | TransformDiffusionTensor3D (const InputVectorPixelType &tensor, const InputPointType &point) const |
| |
virtual
OutputSymmetricSecondRankTensorType | TransformSymmetricSecondRankTensor (const InputSymmetricSecondRankTensorType &tensor, const InputPointType &point) const |
| |
| virtual OutputVectorPixelType | TransformSymmetricSecondRankTensor (const InputVectorPixelType &tensor, const InputPointType &point) const |
| |
| virtual OutputVectorType | TransformVector (const InputVectorType &vector, const InputPointType &point) const |
| |
| virtual OutputVnlVectorType | TransformVector (const InputVnlVectorType &vector, const InputPointType &point) const |
| |
| virtual OutputVectorPixelType | TransformVector (const InputVectorPixelType &vector, const InputPointType &point) const |
| |
| virtual void | UpdateTransformParameters (const DerivativeType &update, ParametersValueType factor=1.0) |
| |
| | itkLegacyMacro (virtual void ComputeJacobianWithRespectToPosition(const InputPointType &x, JacobianType &jacobian) const) |
| |
| | itkLegacyMacro (virtual void ComputeInverseJacobianWithRespectToPosition(const InputPointType &x, JacobianType &jacobian) const) |
| |
| virtual void | CopyInFixedParameters (const FixedParametersValueType *const begin, const FixedParametersValueType *const end)=0 |
| |
| virtual void | CopyInParameters (const ParametersValueType *const begin, const ParametersValueType *const end)=0 |
| |
| virtual void | SetFixedParameters (const FixedParametersType &)=0 |
| |
| virtual void | SetParameters (const ParametersType &)=0 |
| |
| virtual void | SetParametersByValue (const ParametersType &p)=0 |
| |
| unsigned long | AddObserver (const EventObject &event, Command *) |
| |
| unsigned long | AddObserver (const EventObject &event, Command *) const |
| |
| virtual void | DebugOff () const |
| |
| virtual void | DebugOn () const |
| |
| Command * | GetCommand (unsigned long tag) |
| |
| bool | GetDebug () const |
| |
| MetaDataDictionary & | GetMetaDataDictionary () |
| |
| const MetaDataDictionary & | GetMetaDataDictionary () const |
| |
| virtual ModifiedTimeType | GetMTime () const |
| |
| virtual const TimeStamp & | GetTimeStamp () const |
| |
| bool | HasObserver (const EventObject &event) const |
| |
| void | InvokeEvent (const EventObject &) |
| |
| void | InvokeEvent (const EventObject &) const |
| |
| virtual void | Modified () const |
| |
| void | Register () const override |
| |
| void | RemoveAllObservers () |
| |
| void | RemoveObserver (unsigned long tag) |
| |
| void | SetDebug (bool debugFlag) const |
| |
| void | SetReferenceCount (int) override |
| |
| void | UnRegister () const noexceptoverride |
| |
| void | SetMetaDataDictionary (const MetaDataDictionary &rhs) |
| |
| void | SetMetaDataDictionary (MetaDataDictionary &&rrhs) |
| |
| virtual void | SetObjectName (std::string _arg) |
| |
| virtual const std::string & | GetObjectName () const |
| |
| virtual void | Delete () |
| |
| virtual int | GetReferenceCount () const |
| |
| | itkCloneMacro (Self) |
| |
| void | Print (std::ostream &os, Indent indent=0) const |
| |
|
| void | ComputeMatrix () override |
| |
| void | ComputeMatrixParameters () override |
| |
| const InverseMatrixType & | GetInverseMatrix () const |
| |
| void | PrintSelf (std::ostream &os, Indent indent) const override |
| |
| | QuaternionRigidTransform (const MatrixType &matrix, const OutputVectorType &offset) |
| |
| | QuaternionRigidTransform (unsigned int paramDims) |
| |
| | QuaternionRigidTransform () |
| |
| void | SetVarRotation (const VnlQuaternionType &rotation) |
| |
| | ~QuaternionRigidTransform () override=default |
| |
| void | PrintSelf (std::ostream &os, Indent indent) const override |
| |
| | Rigid3DTransform (const MatrixType &matrix, const OutputVectorType &offset) |
| |
| | Rigid3DTransform (unsigned int paramDim) |
| |
| | Rigid3DTransform () |
| |
| | ~Rigid3DTransform () override=default |
| |
| virtual void | ComputeOffset () |
| |
| virtual void | ComputeTranslation () |
| |
| const InverseMatrixType & | GetInverseMatrix () const |
| |
| virtual bool | GetSingular () const |
| |
| const InverseMatrixType & | GetVarInverseMatrix () const |
| |
| bool | InverseMatrixIsOld () const |
| |
| void | PrintSelf (std::ostream &s, Indent indent) const override |
| |
| void | SetVarCenter (const InputPointType ¢er) |
| |
| void | SetVarInverseMatrix (const InverseMatrixType &matrix) const |
| |
| void | SetVarMatrix (const MatrixType &matrix) |
| |
| void | SetVarOffset (const OutputVectorType &offset) |
| |
| void | SetVarTranslation (const OutputVectorType &translation) |
| |
| | ~MatrixOffsetTransformBase () override=default |
| |
| | MatrixOffsetTransformBase (const MatrixType &matrix, const OutputVectorType &offset) |
| |
| | MatrixOffsetTransformBase (unsigned int paramDims) |
| |
| | MatrixOffsetTransformBase () |
| |
| LightObject::Pointer | InternalClone () const override |
| |
| OutputDiffusionTensor3DType | PreservationOfPrincipalDirectionDiffusionTensor3DReorientation (const InputDiffusionTensor3DType &, const InverseJacobianPositionType &) const |
| |
| | Transform () |
| |
| | Transform (NumberOfParametersType NumberOfParameters) |
| |
| | ~Transform () override=default |
| |
| | TransformBaseTemplate ()=default |
| |
| | ~TransformBaseTemplate () override=default |
| |
| | Object () |
| |
| bool | PrintObservers (std::ostream &os, Indent indent) const |
| |
| virtual void | SetTimeStamp (const TimeStamp &time) |
| |
| | ~Object () override |
| |
| | LightObject () |
| |
| virtual void | PrintHeader (std::ostream &os, Indent indent) const |
| |
| virtual void | PrintTrailer (std::ostream &os, Indent indent) const |
| |
| virtual | ~LightObject () |
| |

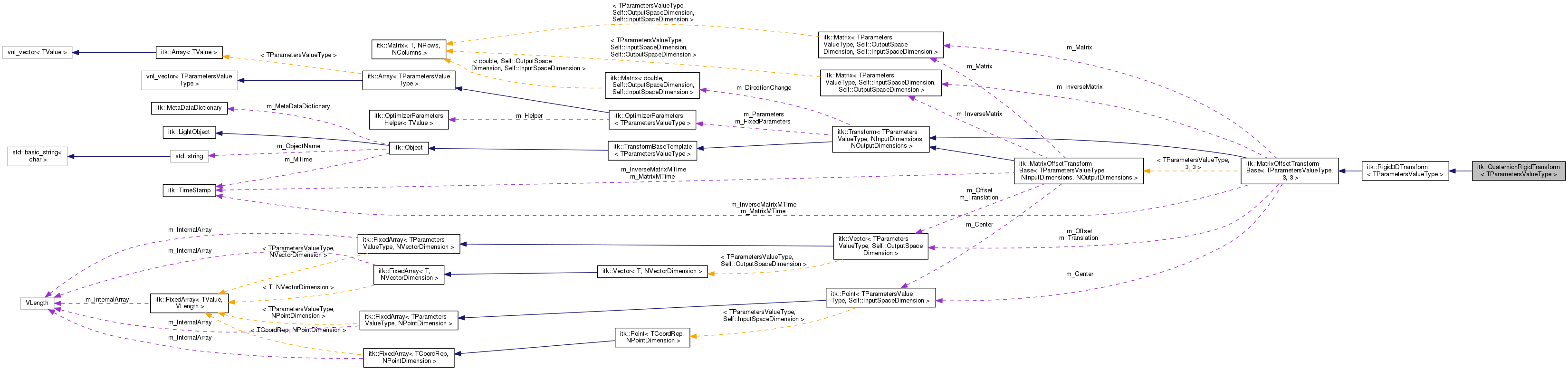
 Inheritance diagram for itk::QuaternionRigidTransform< TParametersValueType >:
Inheritance diagram for itk::QuaternionRigidTransform< TParametersValueType >: 1.8.5
1.8.5