|
ITK
5.0.0
Insight Segmentation and Registration Toolkit
|
|
ITK
5.0.0
Insight Segmentation and Registration Toolkit
|
#include <itkRigid3DTransform.h>
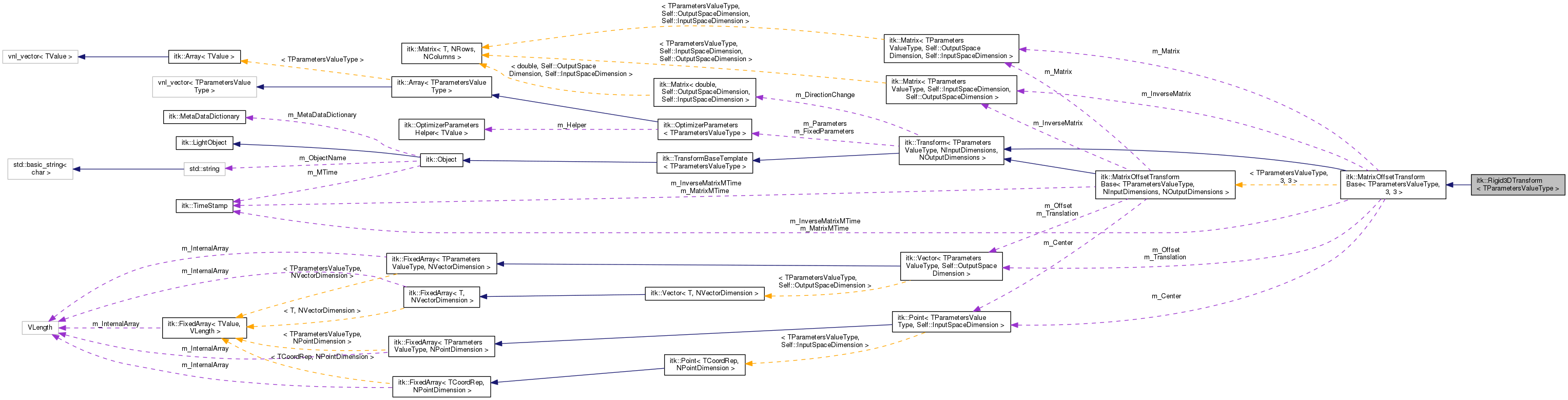
 Inheritance diagram for itk::Rigid3DTransform< TParametersValueType >: Collaboration diagram for itk::Rigid3DTransform< TParametersValueType >:
Inheritance diagram for itk::Rigid3DTransform< TParametersValueType >: Collaboration diagram for itk::Rigid3DTransform< TParametersValueType >:Rigid3DTransform of a vector space (e.g. space coordinates)
This transform applies a rotation and translation in 3D space. The transform is specified as a rotation matrix around a arbitrary center and is followed by a translation.
The parameters for this transform can be set either using individual Set methods or in serialized form using SetParameters() and SetFixedParameters().
The serialization of the optimizable parameters is an array of 12 elements. The first 9 parameters represents the rotation matrix in row-major order (where the column index varies the fastest). The last 3 parameters defines the translation in each dimension.
The serialization of the fixed parameters is an array of 3 elements defining the center of rotation in each dimension.
The Rigid3DTransform is intended to be a base class that defines a consistent family of transform types that respect rigid transformations. Only classes that derive from Rigid3DTransform should be used.
Definition at line 57 of file itkRigid3DTransform.h.
Public Types | |
| using | CenterType = typename Superclass::CenterType |
| using | ConstPointer = SmartPointer< const Self > |
| using | FixedParametersType = typename Superclass::FixedParametersType |
| using | FixedParametersValueType = typename Superclass::FixedParametersValueType |
| using | InputCovariantVectorType = typename Superclass::InputCovariantVectorType |
| using | InputPointType = typename Superclass::InputPointType |
| using | InputVectorType = typename Superclass::InputVectorType |
| using | InputVnlVectorType = typename Superclass::InputVnlVectorType |
| using | InverseJacobianPositionType = typename Superclass::InverseJacobianPositionType |
| using | InverseMatrixType = typename Superclass::InverseMatrixType |
| using | InverseTransformBasePointer = typename InverseTransformBaseType::Pointer |
| using | InverseTransformBaseType = typename Superclass::InverseTransformBaseType |
| using | JacobianPositionType = typename Superclass::JacobianPositionType |
| using | JacobianType = typename Superclass::JacobianType |
| using | MatrixType = typename Superclass::MatrixType |
| using | MatrixValueType = typename Superclass::MatrixValueType |
| using | OffsetType = typename Superclass::OffsetType |
| using | OutputCovariantVectorType = typename Superclass::OutputCovariantVectorType |
| using | OutputPointType = typename Superclass::OutputPointType |
| using | OutputVectorType = typename Superclass::OutputVectorType |
| using | OutputVectorValueType = typename Superclass::OutputVectorValueType |
| using | OutputVnlVectorType = typename Superclass::OutputVnlVectorType |
| using | ParametersType = typename Superclass::ParametersType |
| using | ParametersValueType = typename Superclass::ParametersValueType |
| using | Pointer = SmartPointer< Self > |
| using | ScalarType = typename Superclass::ScalarType |
| using | Self = Rigid3DTransform |
| using | Superclass = MatrixOffsetTransformBase< TParametersValueType, 3, 3 > |
| using | TranslationType = typename Superclass::TranslationType |
| Public Types inherited from itk::MatrixOffsetTransformBase< TParametersValueType, 3, 3 > | |
| using | CenterType = InputPointType |
| using | ConstPointer = SmartPointer< const Self > |
| using | FixedParametersType = typename Superclass::FixedParametersType |
| using | FixedParametersValueType = typename Superclass::FixedParametersValueType |
| using | InputCovariantVectorType = CovariantVector< TParametersValueType, Self::InputSpaceDimension > |
| using | InputDiffusionTensor3DType = typename Superclass::InputDiffusionTensor3DType |
| using | InputPointType = Point< TParametersValueType, Self::InputSpaceDimension > |
| using | InputPointValueType = typename InputPointType::ValueType |
| using | InputSymmetricSecondRankTensorType = typename Superclass::InputSymmetricSecondRankTensorType |
| using | InputTensorEigenVectorType = CovariantVector< TParametersValueType, InputDiffusionTensor3DType::Dimension > |
| using | InputVectorPixelType = typename Superclass::InputVectorPixelType |
| using | InputVectorType = Vector< TParametersValueType, Self::InputSpaceDimension > |
| using | InputVnlVectorType = vnl_vector_fixed< TParametersValueType, Self::InputSpaceDimension > |
| using | InverseJacobianPositionType = typename Superclass::InverseJacobianPositionType |
| using | InverseMatrixType = Matrix< TParametersValueType, Self::InputSpaceDimension, Self::OutputSpaceDimension > |
| using | InverseTransformBasePointer = typename InverseTransformBaseType::Pointer |
| using | InverseTransformBaseType = typename Superclass::InverseTransformBaseType |
| using | JacobianPositionType = typename Superclass::JacobianPositionType |
| using | JacobianType = typename Superclass::JacobianType |
| using | MatrixType = Matrix< TParametersValueType, Self::OutputSpaceDimension, Self::InputSpaceDimension > |
| using | MatrixValueType = typename MatrixType::ValueType |
| using | OffsetType = OutputVectorType |
| using | OffsetValueType = typename OffsetType::ValueType |
| using | OutputCovariantVectorType = CovariantVector< TParametersValueType, Self::OutputSpaceDimension > |
| using | OutputDiffusionTensor3DType = typename Superclass::OutputDiffusionTensor3DType |
| using | OutputPointType = Point< TParametersValueType, Self::OutputSpaceDimension > |
| using | OutputPointValueType = typename OutputPointType::ValueType |
| using | OutputSymmetricSecondRankTensorType = typename Superclass::OutputSymmetricSecondRankTensorType |
| using | OutputVectorPixelType = typename Superclass::OutputVectorPixelType |
| using | OutputVectorType = Vector< TParametersValueType, Self::OutputSpaceDimension > |
| using | OutputVectorValueType = typename OutputVectorType::ValueType |
| using | OutputVnlVectorType = vnl_vector_fixed< TParametersValueType, Self::OutputSpaceDimension > |
| using | ParametersType = typename Superclass::ParametersType |
| using | ParametersValueType = typename Superclass::ParametersValueType |
| using | Pointer = SmartPointer< Self > |
| using | ScalarType = typename Superclass::ScalarType |
| using | Self = MatrixOffsetTransformBase |
| using | Superclass = Transform< TParametersValueType, NInputDimensions, NOutputDimensions > |
| using | TransformCategoryType = typename Superclass::TransformCategoryType |
| using | TranslationType = OutputVectorType |
| using | TranslationValueType = typename TranslationType::ValueType |
| Public Types inherited from itk::Transform< TParametersValueType, NInputDimensions, NOutputDimensions > | |
| using | ConstPointer = SmartPointer< const Self > |
| using | DerivativeType = Array< ParametersValueType > |
| using | DirectionChangeMatrix = Matrix< double, Self::OutputSpaceDimension, Self::InputSpaceDimension > |
| using | FixedParametersType = typename Superclass::FixedParametersType |
| using | FixedParametersValueType = typename Superclass::FixedParametersValueType |
| using | InputCovariantVectorType = CovariantVector< TParametersValueType, NInputDimensions > |
| using | InputDiffusionTensor3DType = DiffusionTensor3D< TParametersValueType > |
| using | InputDirectionMatrix = Matrix< double, Self::InputSpaceDimension, Self::InputSpaceDimension > |
| using | InputPointType = Point< TParametersValueType, NInputDimensions > |
| using | InputSymmetricSecondRankTensorType = SymmetricSecondRankTensor< TParametersValueType, NInputDimensions > |
| using | InputVectorPixelType = VariableLengthVector< TParametersValueType > |
| using | InputVectorType = Vector< TParametersValueType, NInputDimensions > |
| using | InputVnlVectorType = vnl_vector_fixed< TParametersValueType, NInputDimensions > |
| using | InverseJacobianPositionType = vnl_matrix_fixed< ParametersValueType, NInputDimensions, NOutputDimensions > |
| using | InverseTransformBasePointer = typename InverseTransformBaseType::Pointer |
| using | InverseTransformBaseType = Transform< TParametersValueType, NOutputDimensions, NInputDimensions > |
| using | JacobianPositionType = vnl_matrix_fixed< ParametersValueType, NOutputDimensions, NInputDimensions > |
| using | JacobianType = Array2D< ParametersValueType > |
| using | MatrixType = Matrix< TParametersValueType, Self::OutputSpaceDimension, Self::InputSpaceDimension > |
| using | NumberOfParametersType = typename Superclass::NumberOfParametersType |
| using | OutputCovariantVectorType = CovariantVector< TParametersValueType, NOutputDimensions > |
| using | OutputDiffusionTensor3DType = DiffusionTensor3D< TParametersValueType > |
| using | OutputDirectionMatrix = Matrix< double, Self::OutputSpaceDimension, Self::OutputSpaceDimension > |
| using | OutputPointType = Point< TParametersValueType, NOutputDimensions > |
| using | OutputSymmetricSecondRankTensorType = SymmetricSecondRankTensor< TParametersValueType, NOutputDimensions > |
| using | OutputVectorPixelType = VariableLengthVector< TParametersValueType > |
| using | OutputVectorType = Vector< TParametersValueType, NOutputDimensions > |
| using | OutputVnlVectorType = vnl_vector_fixed< TParametersValueType, NOutputDimensions > |
| using | ParametersType = typename Superclass::ParametersType |
| using | ParametersValueType = typename Superclass::ParametersValueType |
| using | Pointer = SmartPointer< Self > |
| using | ScalarType = ParametersValueType |
| using | Self = Transform |
| using | Superclass = TransformBaseTemplate< TParametersValueType > |
| using | TransformCategoryType = typename Superclass::TransformCategoryType |
| Public Types inherited from itk::TransformBaseTemplate< TParametersValueType > | |
| using | ConstPointer = SmartPointer< const Self > |
| using | FixedParametersType = OptimizerParameters< FixedParametersValueType > |
| using | FixedParametersValueType = double |
| using | NumberOfParametersType = IdentifierType |
| using | ParametersType = OptimizerParameters< ParametersValueType > |
| using | ParametersValueType = TParametersValueType |
| using | Pointer = SmartPointer< Self > |
| using | Self = TransformBaseTemplate |
| using | Superclass = Object |
| enum | TransformCategoryType { UnknownTransformCategory =0, Linear =1, BSpline =2, Spline =3, DisplacementField =4, VelocityField =5 } |
| Public Types inherited from itk::Object | |
| using | ConstPointer = SmartPointer< const Self > |
| using | Pointer = SmartPointer< Self > |
| using | Self = Object |
| using | Superclass = LightObject |
| Public Types inherited from itk::LightObject | |
| using | ConstPointer = SmartPointer< const Self > |
| using | Pointer = SmartPointer< Self > |
| using | Self = LightObject |
Static Public Member Functions | |
| static Pointer | New () |
| Static Public Member Functions inherited from itk::MatrixOffsetTransformBase< TParametersValueType, 3, 3 > | |
| static Pointer | New () |
| Static Public Member Functions inherited from itk::Object | |
| static bool | GetGlobalWarningDisplay () |
| static void | GlobalWarningDisplayOff () |
| static void | GlobalWarningDisplayOn () |
| static Pointer | New () |
| static void | SetGlobalWarningDisplay (bool flag) |
| Static Public Member Functions inherited from itk::LightObject | |
| static void | BreakOnError () |
| static Pointer | New () |
Static Public Attributes | |
| static constexpr unsigned int | InputSpaceDimension = 3 |
| static constexpr unsigned int | OutputSpaceDimension = 3 |
| static constexpr unsigned int | ParametersDimension = 12 |
| static constexpr unsigned int | SpaceDimension = 3 |
| Static Public Attributes inherited from itk::MatrixOffsetTransformBase< TParametersValueType, 3, 3 > | |
| static constexpr unsigned int | InputSpaceDimension |
| static constexpr unsigned int | OutputSpaceDimension |
| static constexpr unsigned int | ParametersDimension |
| Static Public Attributes inherited from itk::Transform< TParametersValueType, NInputDimensions, NOutputDimensions > | |
| static constexpr unsigned int | InputSpaceDimension = NInputDimensions |
| static constexpr unsigned int | OutputSpaceDimension = NOutputDimensions |
Additional Inherited Members | |
| Protected Attributes inherited from itk::Transform< TParametersValueType, NInputDimensions, NOutputDimensions > | |
| DirectionChangeMatrix | m_DirectionChange |
| FixedParametersType | m_FixedParameters |
| ParametersType | m_Parameters |
| Protected Attributes inherited from itk::LightObject | |
| std::atomic< int > | m_ReferenceCount |
| using itk::Rigid3DTransform< TParametersValueType >::CenterType = typename Superclass::CenterType |
Definition at line 103 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::ConstPointer = SmartPointer<const Self> |
Definition at line 67 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::FixedParametersType = typename Superclass::FixedParametersType |
Definition at line 85 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::FixedParametersValueType = typename Superclass::FixedParametersValueType |
Definition at line 86 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::InputCovariantVectorType = typename Superclass::InputCovariantVectorType |
Definition at line 94 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::InputPointType = typename Superclass::InputPointType |
Definition at line 98 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::InputVectorType = typename Superclass::InputVectorType |
Definition at line 91 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::InputVnlVectorType = typename Superclass::InputVnlVectorType |
Definition at line 96 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::InverseJacobianPositionType = typename Superclass::InverseJacobianPositionType |
Definition at line 89 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::InverseMatrixType = typename Superclass::InverseMatrixType |
Definition at line 101 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::InverseTransformBasePointer = typename InverseTransformBaseType::Pointer |
Definition at line 110 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::InverseTransformBaseType = typename Superclass::InverseTransformBaseType |
Base inverse transform type. This type should not be changed to the concrete inverse transform type or inheritance would be lost.
Definition at line 109 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::JacobianPositionType = typename Superclass::JacobianPositionType |
Definition at line 88 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::JacobianType = typename Superclass::JacobianType |
Definition at line 87 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::MatrixType = typename Superclass::MatrixType |
Definition at line 100 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::MatrixValueType = typename Superclass::MatrixValueType |
Definition at line 102 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::OffsetType = typename Superclass::OffsetType |
Definition at line 105 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::OutputCovariantVectorType = typename Superclass::OutputCovariantVectorType |
Definition at line 95 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::OutputPointType = typename Superclass::OutputPointType |
Definition at line 99 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::OutputVectorType = typename Superclass::OutputVectorType |
Definition at line 92 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::OutputVectorValueType = typename Superclass::OutputVectorValueType |
Definition at line 93 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::OutputVnlVectorType = typename Superclass::OutputVnlVectorType |
Definition at line 97 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::ParametersType = typename Superclass::ParametersType |
Definition at line 83 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::ParametersValueType = typename Superclass::ParametersValueType |
Definition at line 84 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::Pointer = SmartPointer<Self> |
Definition at line 66 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::ScalarType = typename Superclass::ScalarType |
Definition at line 90 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::Self = Rigid3DTransform |
Standard class type aliases.
Definition at line 64 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::Superclass = MatrixOffsetTransformBase<TParametersValueType, 3, 3> |
Definition at line 65 of file itkRigid3DTransform.h.
| using itk::Rigid3DTransform< TParametersValueType >::TranslationType = typename Superclass::TranslationType |
Definition at line 104 of file itkRigid3DTransform.h.
|
protected |
|
protected |
|
protected |
|
overrideprotecteddefault |
|
virtual |
Create an object from an instance, potentially deferring to a factory. This method allows you to create an instance of an object that is exactly the same type as the referring object. This is useful in cases where an object has been cast back to a base class.
Reimplemented from itk::Object.
Reimplemented in itk::v3::Rigid3DTransform< TParametersValueType >, itk::ScaleSkewVersor3DTransform< TParametersValueType >, itk::VersorTransform< TParametersValueType >, itk::ScaleVersor3DTransform< TParametersValueType >, itk::Similarity3DTransform< TParametersValueType >, and itk::VersorRigid3DTransform< TParametersValueType >.
|
virtual |
Run-time type information (and related methods).
Reimplemented from itk::MatrixOffsetTransformBase< TParametersValueType, 3, 3 >.
Reimplemented in itk::v3::Rigid3DTransform< TParametersValueType >, itk::ScaleSkewVersor3DTransform< TParametersValueType >, itk::QuaternionRigidTransform< TParametersValueType >, itk::ScaleVersor3DTransform< TParametersValueType >, itk::Euler3DTransform< TParametersValueType >, itk::Similarity3DTransform< TParametersValueType >, itk::VersorRigid3DTransform< TParametersValueType >, itk::VersorTransform< TParametersValueType >, and itk::CenteredEuler3DTransform< TParametersValueType >.
| bool itk::Rigid3DTransform< TParametersValueType >::MatrixIsOrthogonal | ( | const MatrixType & | matrix, |
| const TParametersValueType | tolerance = MatrixOrthogonalityTolerance< TParametersValueType >::GetTolerance() |
||
| ) |
Utility function to test if a matrix is orthogonal within a specified tolerance
|
static |
Run-time type information (and related methods).
|
overrideprotectedvirtual |
Print contents of an Rigid3DTransform
Reimplemented from itk::Object.
Reimplemented in itk::ScaleSkewVersor3DTransform< TParametersValueType >, itk::VersorTransform< TParametersValueType >, itk::Similarity3DTransform< TParametersValueType >, itk::ScaleVersor3DTransform< TParametersValueType >, and itk::VersorRigid3DTransform< TParametersValueType >.
|
override |
Directly set the rotation matrix of the transform.
|
virtual |
Directly set the rotation matrix of the transform.
Reimplemented in itk::ScaleSkewVersor3DTransform< TParametersValueType >, itk::Similarity3DTransform< TParametersValueType >, and itk::ScaleVersor3DTransform< TParametersValueType >.
|
overridevirtual |
Set the transformation from a container of parameters This is typically used by optimizers. There are 12 parameters. The first 9 represents the rotation matrix is row-major order and the last 3 represents the translation.
Implements itk::Transform< TParametersValueType, NInputDimensions, NOutputDimensions >.
Reimplemented in itk::ScaleSkewVersor3DTransform< TParametersValueType >, itk::Similarity3DTransform< TParametersValueType >, itk::ScaleVersor3DTransform< TParametersValueType >, itk::VersorRigid3DTransform< TParametersValueType >, and itk::VersorTransform< TParametersValueType >.
| void itk::Rigid3DTransform< TParametersValueType >::Translate | ( | const OffsetType & | offset, |
| bool | pre = false |
||
| ) |
Compose the transformation with a translation
This method modifies self to include a translation of the origin. The translation is precomposed with self if pre is true, and postcomposed otherwise.
|
static |
Definition at line 79 of file itkRigid3DTransform.h.
|
static |
Definition at line 80 of file itkRigid3DTransform.h.
|
static |
Definition at line 81 of file itkRigid3DTransform.h.
|
static |
Dimension of the space.
Definition at line 78 of file itkRigid3DTransform.h.
 1.8.5
1.8.5